Головна сторінка Випадкова сторінка
КАТЕГОРІЇ:
АвтомобіліБіологіяБудівництвоВідпочинок і туризмГеографіяДім і садЕкологіяЕкономікаЕлектронікаІноземні мовиІнформатикаІншеІсторіяКультураЛітератураМатематикаМедицинаМеталлургіяМеханікаОсвітаОхорона праціПедагогікаПолітикаПравоПсихологіяРелігіяСоціологіяСпортФізикаФілософіяФінансиХімія
Групи належності та сторонні групи
Дата добавления: 2014-12-06; просмотров: 939
|
|
Характер движения зависит не от величины сил, а от той среды, к которой приложены силы. Среда характеризуется способностью создавать противосилы.
В механике имеются три типовые среды, с которыми в большинстве случаев и взаимодействует источник силы. От этого взаимодействия получаются перечисленные выше характеры движения. Соответственно имеются следущие типовые механические среды:
· упругая;
· инерционная;
· вязкая.
Упругая среда. Это среда, которая создает противосилы, пропорциональные перемещению с обратным знаком.

|
Типичным примером является пружина, рис. 5.При взаимодействии источника силы с пружиной она мгновенно сжимается, с тем чтобы ответить противосилой, источник силы делает скачок на величину s. Величина скачка зависит от жесткости пружины С. Чем больше жесткость, тем меньше величина перемещения. С этой целью и делают, например, жесткий пол, чтобы он не продавливался при ходьбе человека по полу. В этом случае источником силы является человек, которого притягивает Земля с величиной его веса. Эта сила не изменяется при перемещении человека, а половицы являются той средой, с которой взаимодействует человек. Они прогибаются, чтобы создать противосилу.
Конечно, пружина — это образ упругой среды. К таким средам относятся резина, упругий мяч, поршень цилиндра, сжимающего воздух, и многое тому подобное другое.
Инерционная среда. Это среда, которая создает противосилы, пропорциональные ускорению с обратным знаком.Типичным примером является тело, имеющее массу. Коэффициент пропорциональности в этом случае также называют массой. Это послужило тому, что иногда массу называют мерой инертности тела, что, впрочем, в нашем курсе делать не будем, потому что, как правило, масса в механизмах прямо не исчисляется, а имеют дело с так называемой приведенной к данному перемещению массой. Это подробно рассматривается, например, при изучении регуляторов частоты вращения дизель-генераторов.

Вязкая среда. Это среда, которая создает противосилы, пропорциональные скорости с обратным знаком. Типичным представителем этой среды являются различного рода жидкости, воздух и другие тому подобные среды.
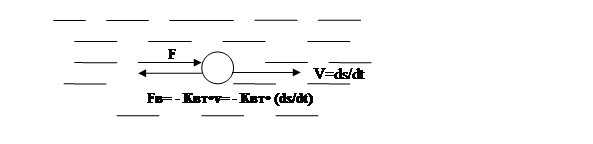
Рис. 7. Образ вязкой среды
Вязкая среда отличается от двух выше указанных сред тем, что никогда не отдает работу, которую затратил источник силы. Действительно, сжатая пружина разжимается, масса останавливается, отдавая работу, но вязкая среда никогда работу не отдает, куда бы ни было направлено движение тела. Уяснить это можно, рассмотрев приращение работы вязкой среды:
dA= - Квт• (ds/dt)•ds= - Квт• (ds2/dt).
Но ds2 всегда положительная величина. Поэтому в целом величина dA всегда отрицательна. Силы вязкого трения, всегда поглощающие работу, называют еще диссипативными силами (рассеивающими работу). Они необходимы для поглощения всякого рода колебаний. Организация вязких сред в механизмах и агрегатах подчас является необходимым условием устойчивой работы механизма. Хотя, конечно, силы вязкого трения уменьшают коэффициент полезного действия механизма.
В заключение заметим (изменив местами инерционную и вязкую среды), что природа создала стройную систему сред:
· упругую Fу= - С•s;
· вязкую Fв= - Квт• (ds/dt);
· инерционную Fи= - M•(d2s/dt2),—
которые отличаются друг от друга только степенью производной от перемещения (и, конечно, названием коэффициентов пропорциональности, что принципиально не существенно).
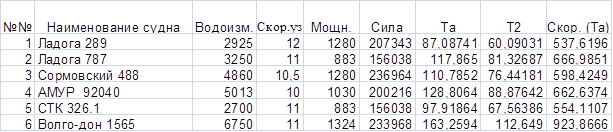
Рассмотрим задачу. Надо определить параметры движения т/х «Ладога».
Водоизмещение — 2925 т, скорость — 12 узлов, мощность главных двигателей — 1280 кВт, 1280х4/3=1707 л.с. (для практических расчетов и с учетом принципа идеализации КПД винта принимаем равным 1).
Масса — 2925000 кг, скорость хода номинальная — 12х1852/3600=6,17 м/с, мощность номинальная — 1280000 Вт.
Сила FN на упорных подшипниках 1280000/6,17=207455,4.
Н=~ 20745 кгс~=21т
Коэффициент вязкого трения FN / VN=207455/6,17=33623 Нс/м.
Сумма всех сил всегда должна быть равна нулю.
 =0 откуда
=0 откуда 
Прежде чем подставить численные значения, рассмотрим упрощающие преобразования, приводящие уравнение к некоторому стандартному виду. Все преобразования делаются на основе тождественных преобразований, а именно: деление и умножение на одно и то же число, сложение и вычитание одного и того же числа, деление или умножение обеих частей уравнения на одно и то же число. Такие преобразования не изменяют исходного физического уравнения.
Перейдем к относительным единицам, разделив обе части уравнения на FN:
 .
.
Обычно относительные значения обозначают, как правило, малыми соответствующими буквами.
Так:
 ,
,  .
.
Приходим к следующему простому уравнению:


или с учетом перехода к относительному времени  имеем
имеем
 .
.
Его решение, при номинальной силе  , будет
, будет  . Это проверяется непосредственной подстановкой решения в уравнение.
. Это проверяется непосредственной подстановкой решения в уравнение.

Удобно перейти к так называемой постоянной удвоения Т2 = Та*0,67≈ Та*0,7.
С ее помощью легко на практике строить процесс разгона или торможения судна, для чего по оси времени откладывают отрезки времени Т2, а по оси ординат — половины разности между установившимся значением переменной и точкой, полученной на предыдущем шаге построения функции.
Так, построение функции разгона судна, если дали полный вперед (f=1), будет выглядеть так, как показано на рис. 8.
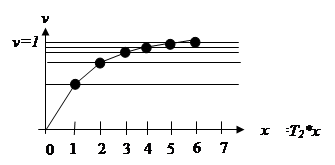
Рис. 8. Построение графика разгона судна
Как видим, уже после четырех-пяти промежутков Т2, то есть около 4 — 5 минут (для судов типа «ЛАДОГА»), судно достигнет установившейся скорости движения.
Уравнение судна при остановке главных двигателей:
 или
или  .
.
Физически в этом случае имеем силу вязкого трения, которая уравновешивается силой инерции. С уменьшением скорости и сила инерции должна уменьшаться, то есть должно уменьшаться ускорение, что и будет происходить вплоть до скорости и ускорения, равных нулю.
Непосредственной подстановкой определяем, что  .
.
 |
Рис. 9. Построение графика остановки судна
Интересной информацией, полученной из этого уравнения, является путь, который пройдет судно после остановки главных двигателей:
 .
.
Это значит, что судно пройдет путь, численно равный единице скорости, измеренной в относительных единицах времени (с базовым значением времени Та), то есть за время Та. В последней колонке приведенной выше таблицы дано значение этой скорости, численно равной искомому пути. Так, для теплохода типа «Ладога 289» этот путь будет равен 6,17*87̊≈537 м. Как видим, этот путь немалый, от половины до километра. Поэтому при швартовке реверс движителей необходим для торможения судна.
ЛЕКЦИЯ 4. ОСНОВЫ МЕХАНИКИ ВРАЩЕНИЯ
Судовой электромеханик в основном имеет дело с вращающимися механизмами.
Аналогом силы во вращательном движении является момент. Момент — векторное произведение плеча  на силу
на силу  (см. рис. 4.1):
(см. рис. 4.1):
 .
.
Кинематика вращения такова.
Аналогом перемещения радиуса является угловое перемещение  в радианах. Радиан — rad — это единица углового перемещения на длину дуги, равную радиусу окружности.
в радианах. Радиан — rad — это единица углового перемещения на длину дуги, равную радиусу окружности.
Как известно, длина окружности равна 2πR. Перемещение по кругу, таким образом, равно 2π радианам.
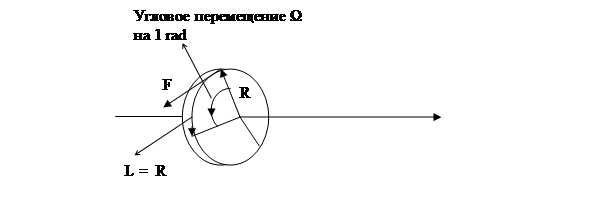
Рис. 4.1. Кинематика вращения механизмов
Угловое перемещение считается положительным, если оно совершается против вращения часовой стрелки, если смотреть с конца оси, обращенной к приводу (аналогично вращению Земли, если смотреть со стороны Северного полюса). Таким образом, угловое перемещение — это тоже вектор  . Угловая частота вращения
. Угловая частота вращения  равна величине углового перемещения за единицу времени:
равна величине углового перемещения за единицу времени:
 .
.
Работа силы за один оборот равна:
 .
.
То есть работа силы за один оборот равна 2π моментов.
Мощность:
 .
.
Величину  , еще раз повторимся, называют угловой частотой вращения.
, еще раз повторимся, называют угловой частотой вращения.
Все величины, обозначенные (→) являются векторными. На рис. 4.1 все величины имеют положительное направление вектора по оси Х, так как, если смотреть со стороны направления положительной оси, то движение и направление момента вращающей силы будут видны против часовой стрелки. Длина вектора численно равна соответствующей величине. Динамика вращения с учетом изложенных положений кинематики будет следующая.
Предположим, что на конце радиуса находится материальная точка с массой m (пишется курсивом, чтобы отличить от обозначения момента  ). На эту точку действует сила
). На эту точку действует сила  . Точка движется с линейной скоростью:
. Точка движется с линейной скоростью:

Сил без противосил не бывает. Значит, материальная точка должна двигаться с ускорением:
 .
.
Умножим обе части равенства на R, чтобы от силы перейти к ее моменту:
или

То есть момент силы равен так называемому инерционному моменту, который, в свою очередь, равен  , где
, где  — угловое ускорение. При Dt®0 имеем:
— угловое ускорение. При Dt®0 имеем:
 .
.
То есть просматривается следующая аналогия с инерционной средой при поступательном движении (  , или более грамотно с учетом анализа бесконечно малых величин
, или более грамотно с учетом анализа бесконечно малых величин  ). Роль массы при вращении играет величина
). Роль массы при вращении играет величина  , которая называется моментом инерции и обозначается:
, которая называется моментом инерции и обозначается:
 .
.
Известно, что вначале люди не отличали массу от веса, так как на Земле численно масса равна весу. Поэтому величина  получила название
получила название  — маховой момент. Эта величина дается во всех справочниках. Таким образом, если сила измеряется в ньютонах, надо справочную величину
— маховой момент. Эта величина дается во всех справочниках. Таким образом, если сила измеряется в ньютонах, надо справочную величину  (маховой момент) разделить на четыре и получить момент инерции
(маховой момент) разделить на четыре и получить момент инерции  .
.
Получаем следующее уравнение динамики вращающихся масс:

 .
.
Соответственно, если на вал будут действовать как движущие силы по направлению вращения, так и тормозящие силы нагрузки, то справа будем иметь разность моментов движения и торможения — нагрузки:
 .
.
Это и есть уравнение движения в физических величинах.
Перейдем к относительным величинам. Для этого разделим обе части равенства на номинальный момент  . Обозначим:
. Обозначим:
 ,
,
а
 .
.
Кроме того, обозначим относительную угловую частоту вращения через  . Заметим, что
. Заметим, что  , где
, где  есть номинальное число оборотов в минуту. Преобразуем уравнение в физических величинах в уравнение в относительных величинах:
есть номинальное число оборотов в минуту. Преобразуем уравнение в физических величинах в уравнение в относительных величинах:

или
 .
.
Величина  носит название механической постоянной времени агрегата и обозначается
носит название механической постоянной времени агрегата и обозначается  . Она дается в справочниках для конкретного агрегата, или ее можно получить, зная номинальную частоту вращения, маховой момент агрегата и вычислив номинальный момент (с учетом знания номинальной частоты вращения и номинальной мощности механизма). Окончательно получаем уравнение динамики вращающегося агрегата:
. Она дается в справочниках для конкретного агрегата, или ее можно получить, зная номинальную частоту вращения, маховой момент агрегата и вычислив номинальный момент (с учетом знания номинальной частоты вращения и номинальной мощности механизма). Окончательно получаем уравнение динамики вращающегося агрегата:
где — механическая постоянная времени,
m — относительное значение движущего момента,
λ — относительное значение тормозного момента.
Обсудим полученный результат. В этом уравнении:
 — выход;
— выход;
m — вход 1;
λ — вход 2.
 |
Рис. 4.2. Структура вращающегося агрегата
Вращающийся агрегат по своей структуре, рис. 4.2, представляет собой интегральное звено с входом (m-λ) (1/Та). Если (m-λ)>0, то выход будет непрерывно увеличиваться вплоть до бесконечности, если (m-λ)<0, то выход будет непрерывно уменьшаться вплоть до минус бесконечности. Иначе говоря, если вход не будет равен нулю, то агрегат пойдет в разнос. Избежать разноса можно, только сделав зависимость m или λ от φ. Так и получают с помощью различного рода регуляторов или естественной зависимости λ от φ.
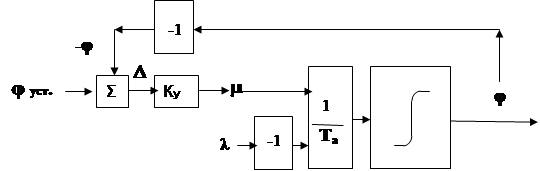
Рис. 4.3. Структура объекта с регулятором частоты
На рис. 4.3 объект дополнен регулятором частоты с отрицательной обратной связью по частоте вращения. В его состав входят инвертор, меняющий знак φ, сумматор, на выходе которого появляется разность D между уставкой, задающей желаемое значение частоты, и частотой на выходе из объекта. Эту разность называют ошибкой регулирования, так как она показывает отклонение реальной частоты от заданной. Ошибка поступает на усилитель с коэффициентом Ку, который и формирует регулирующее воздействие m,как правило, требующее усилий по передвижению рейки топливного насоса, штока клапана и др.Вустановившемсярежимеm=D*Ку=ג. Только при этом условии объект не пойдет в разнос. Тормозной момент ג задается работой механизмов на валу агрегата, которые называются приводом. Привод, в свою очередь, обеспечивает нужды судна. Поэтому это внешний фактор, под который должно подстроиться регулирующее воздействие m. Из приведенного равенства видно, что при таком регулировании ошибка D неизбежна. Причем чем больше тормозной момент ג, тем больше ошибка. Но чем больше Ку, тем ошибка становится меньше, и точность повышается. Однако беспредельно Ку увеличивать нельзя, так как система в целом перейдет в колебательный режим (подробно об этом излагается в теории автоматического управления, что выходит за рамки данного обсуждения). Наоборот, если появились колебания, то первым делом надо уменьшить коэффициент усиления регулятора, пожертвовав точностью регулирования. Изменение Ку является предметом настройки регулятора наряду с другими факторами. Ошибка в процентном отношении при номинальном режиме, ג=1, носит название «статизм» или «неравномерность регулирования», на английском языке «droop». Этот весьма важный параметр для эксплуатации параллельно работающих механизмов обычно равен 3%. Предусматривается механизм для его настройки от 2 до 6%.
Регулятор можно не делать, если имеем характеристику привода, зависящую от частоты вращения. Например, если приводом является винт судна, то регулирование скорости судна можно осуществлять только лишь изменением m. Известно, что винтовая характеристика имеет квадратичную зависимость от частоты вращения. При такой характеристике происходит саморегулирование объекта, см. рис. 4.4.

Рис. 4.4. Пример саморегулирования
Это свойство саморегулирования (обратная связь через среду, с которой взаимодействует объект) часто применяется на малых судах, катерах и яхтах. При этом устройство двигателя значительно упрощается. Структура такого саморегулирования показана на рис. 4.5.
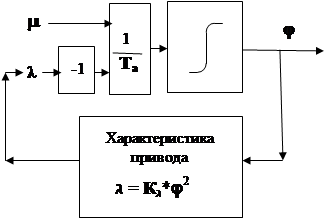
Рис. 4.5. Структура объекта с саморегулированием
В заключение скажем, что вопрос регулирования и настройки, а также проектирования устойчивой системы (вращающийся механизм — привод) зависит от комплекса конкретных условий, простейшие из которых были рассмотрены в настоящем разделе.
| <== предыдущая лекция | | | следующая лекция ==> |
| Сім'я як соціальний інститут суспільства. | | | Соціально-етнічні спільноти людей та тенденції їхнього розвитку. |