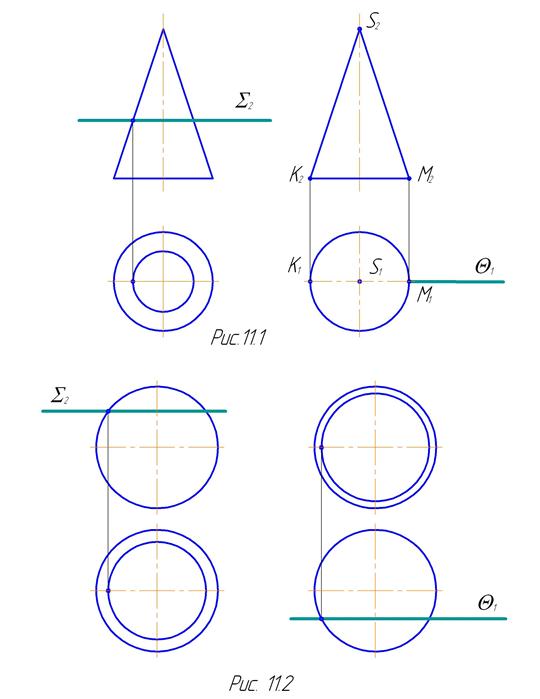
ЗАДАЧА 11Условие задачи: построить проекции линии пересечения заданных поверхностей с помощью вспомогательных секущих плоскостей. Определить видимость линии пересечения и очерков поверхностей (приложение 9). Общие указания: задачу необходимо выполнить простым карандашом на двухкартинном чертеже на формате А3 в масштабе 1: 1, перенести условие задачи на формат и определиться с выбором вида и положения плоскостей-посредников. Положение секущих плоскостей-посредников выбираются в зависимости от того, какие поверхности пересекаются, и как эти поверхности расположены относительно плоскостей проекций П1 и П2. Вспомогательные плоскости должны выбираться так, чтобы они пересекали каждую из заданных поверхностей по графически простым линиям — прямым или окружностям. Кроме того, желательно, чтобы окружности на одну из плоскостей проекций проецировались в натуральную величину. Поэтому в случае пересечения поверхностей вращения в качестве вспомогательных плоскостей, как правило, выбираются плоскости уровня. Если же среди пересекающихся поверхностей есть линейчатая поверхность, то в качестве плоскостей-посредников могут использоваться проецирующие плоскости. От того, насколько удачно выбраны вспомогательные плоскости, в конечном итоге зависит точность полученного результата и время, потраченное на решение задачи. Количество вспомогательных плоскостей также влияет на точность решения задачи. Чем большее число вспомогательных плоскостей будет введено, тем точнее будут построены проекции линии пересечения. При выполнении задания рекомендуется провести не менее пяти вспомогательных секущих плоскостей. Найденные точки искомой линии пересечения необходимо соединить плавной линией с использованием лекала с учетом ее видимости относительно заданных поверхностей. Примеры решения: для решения рассматриваемой позиционной задачи необходимо, как уже было отмечено выше, воспользоваться вспомогательными секущими плоскостями, пересекающими поверхности по графически простым линиям — прямым и окружностям, которые проецируются на одну из плоскостей проекций П1 или П2 также в простые линии. Для прямого кругового конуса с осью вращения, перпендикулярной плоскости проекций P1, это горизонтальные плоскости уровня (S на рис. 11.1), пересекающие конус по окружностям, и фронтальная плоскость уровня Q (рис. 11.1), пересекающая конус по очерковым образующим SK и SM. Горизонтальные плоскости уровня (S на рис. 11.2) и фронтальные плоскости уровня (Q на рис. 11.2) пересекают сферу по окружностям, которые проецируются в окружности. Торовые поверхности, полученные вращением дуги окружности вокруг горизонтально проецирующей оси (рис. 11.3), пересекаются горизонтальными плоскостями уровня S также по окружностям. Наклонный цилиндр на рис. 11.4 горизонтальной плоскостью уровня S пересекается по окружности с центром в точке O и радиусом R, фронтальной плоскостью уровня Q по образующим KM и NL. Многогранники пересекаются плоскостями по многоугольникам (рис. 11.5). Ниже рассмотрены примеры решения подобных задач.
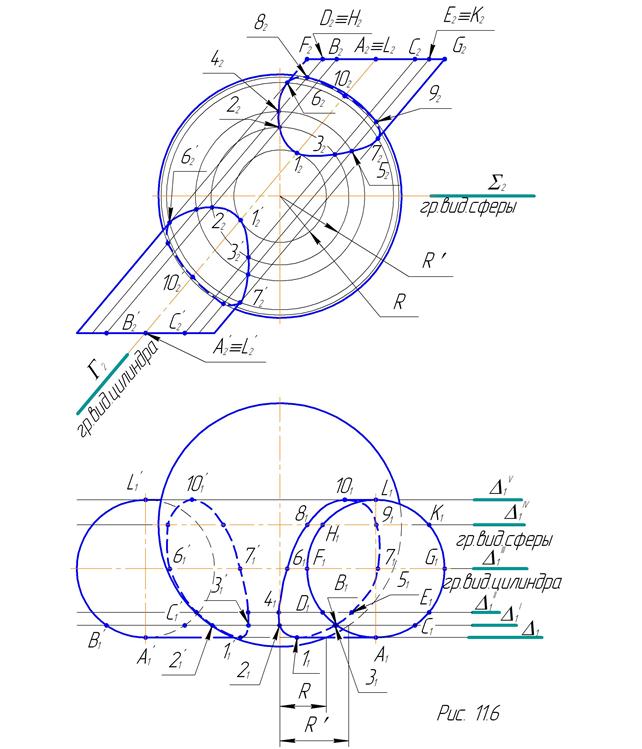
Задача 11.1. Построить линию пересечения поверхности сферы и эллиптического цилиндра (рис. 11.6). В качестве вспомогательных секущих плоскостей можно выбрать горизонтальные плоскости уровня, например, S, которые пересекают сферу и цилиндр по окружностям, или фронтальные плоскости уровня D … DV, которые пересекают сферу по окружностям, а цилиндр — по прямолинейным образующим.
В первом случае диапазон применяемых плоскостей точно не определен. Можно лишь с уверенностью сказать, что высота расположения плоскостей уровня должна быть такой, чтобы эти плоскости пересекались со сферой (на плоскости П2 фронтальные проекции вспомогательных плоскостей должны проводиться между точками касания с самой верхней и самой нижней точками сферы). А это значит, что точки границ видимости линии пересечения можно построить лишь примерно, подбирая нужную высоту плоскости-посредника. Во втором случае диапазон применения плоскостей известен: от плоскости D, касательной к поверхности цилиндра по ближней к наблюдателю образующей АА /, до плоскости DV, касательной к цилиндру по дальней от наблюдателя образующей LL /. Учитывая сказанное, в качестве вспомогательных плоскостей будем использовать фронтальные плоскости уровня. Плоскость D пересекает сферу по окружности радиусом R (который определяется расстоянием от оси сферы до ее очерка) и касается цилиндра по образующей АА /. Фронтальные проекции этих окружности и образующей пересекаются в точках 12 и 1/2, которые будут принадлежать искомой линии пересечения поверхностей. Их горизонтальные проекции находят по линиям проекционной связи на следе плоскости D — D1. Для нахождения других точек линии пересечения проведем следующие вспомогательные плоскости и повторим алгоритм решения. Так плоскость D/ пересекает сферу по окружности радиусом R /, цилиндр по образующим ВВ / и СС /. В их пересечении получают две пары точек — 2 и 2/; 3 и 3/. Плоскость D// позволяет определить точки 4 и 4/; 5 и 5/, плоскость D/// — точки 6 и 6/; 7 и 7/, плоскость D/V — точки 8 и 8 /, 9 и 9 /, плоскость DV — точки 10 и 10/. Видимость линии пересечения определяют, исходя из видимости обеих поверхностей. Если точка лежит на невидимой части хотя бы одной из поверхностей, то она принадлежит невидимой части линии пересечения. Граница видимости сферы на П1 совпадает с плоскостью S (т.е. границей видимости является экватор сферы), граница видимости цилиндра — крайние очерковые образующие АА / и LL /, лежащие в плоскости G. Поэтому верхняя часть линии пересечения на сфере видна, а на цилиндре в точках 1 и 10 делится на видимую и невидимую части. Нижняя часть линии пересечения 1/ и 10/ на сфере не видна. Граница видимости сферы на П2 совпадает с плоскостью DIV (главный меридиан сферы), граница видимости цилиндра — с плоскостью D/// (крайние очерковые образующие). Последняя плоскость находится к наблюдателю ближе, а значит, именно точки 6 и 7, 6/ и 7/, принадлежащие линии пересечения, делят ее на видимую и невидимые части на П2 Видимая часть линии пересечения переходит в видимые части очерков цилиндра. Задача 11.2. Построить линию пересечения торовой поверхности и конуса вращения (рис. 11.7). В качестве вспомогательных секущих плоскостей выбирают горизонтальные плоскости уровня, которые пересекают тор и конус по окружностям. Самая нижняя секущая плоскость D пересекает обе поверхности по окружностям основания, которые пересекаются в точках 1 и 1¢;, принадлежащих искомой линии пересечения поверхностей. Их фронтальные проекции находят по линиям проекционной связи на следе плоскости D — D2. Положение самой верхней плоскости точно определить невозможно без дополнительных построений (об этом ниже), но не выше вершины конуса. Для нахождения других точек линии пересечения проведем следующие вспомогательные плоскости и повторим алгоритм решения. Так плоскость D / пересекает торовую поверхность по окружности радиусом R, конус — по окружности радиусом r. В их пересечении получают точки 2 и 2/. Плоскость D// позволяет определить точки 3 и 3/, плоскость D/// — точки 4 и 4/. В плоскости D/V окружности уже не пересекаются, т.е. самая верхняя точка линии пересечения находится ниже этой плоскости. Чтобы точно определить её положение, необходимо так выбрать положение плоскости, чтобы окружности пересечения с обеими поверхностями касались друг друга.
Граница видимости обеих поверхностей на П1 совпадает с плоскостью D, поэтому линия пересечения на П1 видна. Граница видимости конуса на П2 совпадает с плоскостью S (горизонтальный след S1), граница видимости торовой поверхности — с плоскостью G. Плоскость S находится к наблюдателю ближе, а значит, именно точка 5, принадлежащая линии пересечения, делит ее на видимую и невидимые части на П2. Видимая часть линии пересечения переходит в видимые части очерков конуса. На плоскости П2 также необходимо построить точку 6 (горизонтальная проекция принадлежит следу плоскости G) на очерке торовой поверхности. Для того чтобы построить самую верхнюю точку, принадлежащую линии пересечения, необходимо спроецировать поверхности на плоскость P4, параллельную их общей плоскости симметрии L. В пересечении очерков получают точку 7 (рис. 11.8).
|