
Режим работы АРК.
Независимо от типа радиокомпаса у него обязательно должна обеспечиваться работа в следующих режимах: “Антенна” и ”Компас”. В некоторых АРК более ранних выпусков (АРК-11, АРК-9) имелся также режим " Рамка" В режиме “Антенна” прием сигналов осуществляется только на направленную антенну, системы автоматического слежения (компасная часть) отключена и АРК представляет собой обычный радиоприемник супергетеродинного типа. Режим “Компас ” является основным режимом работы АРК, т.е. режимом автоматического однозначного пеленгование радиостанций. При этом прием сигналов осуществляется на не направленную и направленную антенны одновременно. И следующая система автоматического управления положением рамочной антенны и передачи ее углового положения стрелкой указателей позволяет непрерывно и однозначно отсчитывает значение КУР. Режим “Рамка” предусмотрен на случай отказа автоматической части компаса и является режимом ручного пеленгования радиостанции. В этом режиме АРК работает как обычный радиоприемник, но прием осуществляется на направленную антенну, которую можно вращать в горизонтальной плоскости вручную дистанционно. Вследствие направленных свойств антенны уровень сигнала на выходе приемника зависит от ее положения относительно направления на пеленгующую радиостанцию. В момент, когда нормаль к плоскости витков рамочной антенны совпадает с направлением на радиостанцию это сигнал минимальным и равен нулю. Но при таком методе пеленгования КУР определяется двухзначно т.к. диаграммы направленности рамочной антенны (см. рис.3) имеет два минимума, отличных на 180°. Для исключения возможной ошибки определения пеленга, необходимо знать ориентировочное направление на пеленгуемою радиостанцию.
Погрешности автоматических радиокомпасов. С помощью любого радиопеленгатора, в том числе и АРК, направление на радиостанцию определяется путем определения направления, которого приходит к направленной антенне радиоволна пеленгуемой радиостанции. Следовательно, методические погрешности будут отсутствовать только при условии, что радиоволны в плоскости горизонта распространяются строго прямолинейно. Кроме того, для устранений этих погрешностей, необходимо чтобы в близи направленной антенны отсутствовали какие-либо предметы, отражающие радиоволны, так как в противном случае АРК будут реагировать на эти вторичные радиоволны, направление прихода которых к направленной антенне не совпадает с направлением на пеленгуемую радиостанцию. Но так как рамочная антенна АРК устанавливается на фюзеляже ВС, который хорошо отражает приходящие радиоволны, то она подвергается воздействию не только первичной радиоволны, приходящей с направления на пеленгуемую радиостанцию, но и вторичных радиополей, создаваемых фюзеляжем ВС. Радиодевиация в самолетных АРК. Погрешности пеленгования, вызванные влиянием окружающих рамочную антенну предметов, называют погрешностями радиодевиации. Девиация АРК вызывается главным образом корпусом ВС, его фюзеляжем и плоскостями. Для оценки этого влияние фюзеляж и плоскости можно представить в виде двух вертикально расположенных взаимно перпендикулярных замкнутых витков рис.6. Их влияние на работу АРК практически эквивалентно влиянию корпуса ВС.
Рис.5. Возникновение радиодевиации, вызванной влиянием фюзеляжа и крыльями самолета.
Напряженность магнитного поля радиоволны, пеленгуемой радиостанции H можно разложить на две составляющие: - продольную H1 = H sin p и поперечную H2 = H cos p. Под их влиянием в фюзеляже и плоскостях возникают вторичные поля ∆H1 и ∆H2. В результате сложения основного и вторичных полей вектор суммарного магнитного поля H Σ в общем случае отличается от вектора H основного поля по величине и ориентировки в пространстве (угол ∆). При пеленговании радиостанции рамочная антенна устанавливается параллельно вектору H Σ, а нормаль к плоскости ее витков будет ориентирована под углом q по отношению к продольной оси ВС. Из рис.5 видно, что p = q + ∆; или где p-курсовой угол радиостанции (кур); q-отсчет АРК (ОРК). Угол ∆ характеризует девиацию АРК, вызванную влиянием корпуса ВС. В [3] показано, что
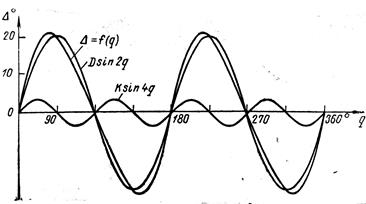
∆ = D sin 2 q + K sin 4 q +……., где
D = (1-а) / (1+ а) К = D2/2.
Первый член этого выражение при изменении q в переделах 360˚ имеет четыре максимума и характеризует четвертную радиодевиацию. Второй член имеет восемь максимумов и характеризует октантальную радиодевиацию. Коэффициенты a, К и D зависят от формы тела, вызывающего радиодевиацию. ак, например, для бесконечно длинного продольного цилиндра a = 0,5; D=1/3; K=1/18 и радиодевиация, создаваемая таким телом:
∆= 19 sin 2q + 3 sin 4q На рис.6 приведен график радиодевиации АРК, установленного на корпус цилиндрической формы.
Рис. 6. График радиодевиации
Такие графики определяются опытным путем и могут использоваться для внесения поправок в результаты пеленгования или для регулировки специальных устройств, называемых компенсаторами радиодевиации (КД), входящие в конструкцию АРК. Компенсаторы могут быть механического, электрического или смешанного типов, и решают одну функцию, вычисляя
КУР = ОРК + ∆;.
Кроме того, АРК работаю в диапазоне средних волн (ГМВ), поэтому погрешности радиодевиации незначительно зависят от длины рабочей волны (частоты настройки) АРК. Вместе с тем погрешности радиодевиации (см. рис.6), имеют четко выраженную зависимость от величины КУР. Следовательно, радиодевиация погрешность систематическая и может быть устранена путем введения поправок в показания АРК. “Ночной” эффект.
Погрешности, обусловленные особенностями распространение средних волн, могут сказываться в любое время суток, но они особо заметны утром и вечером. Средние волны огибают земную поверхность, т.е. распространяются поверхностными волнами, и одновременно могут отражаться от ионосферы и приниматься как пространственные волны. Дальность прохождения поверхностных волн составляет приблизительно 150 км и практически не зависит, от каких либо факторов, кроме мощности передатчика. Но так как ионизация ионосферы обусловлена воздействием на нее Солнца, то условия распространения поверхностных волн при наличии и отсутствия освещенности нижнего слоя ионосферы различны и резко изменяются в утреннее и вечерние время. Неустойчивость ионосферы особенно заметно проявляется за два часа до захода и в течение двух часов после восхода Солнца. В это время показания АРК становятся неустойчивыми, наблюдаются периодические и хаотические колебания стрелок указателей. Величина погрешности пеленгование может достигать ±35°. Причиной является решающее воздействие пространственных радиоволн. Поэтому в указанные промежутки времени не рекомендуется использовать для пеленгования радиостанции удаление от ВС на расстояниях более 100…150км. Кроме этого рекомендуется, по возможности, увеличить высоту полета ВС, что приводит к возрастанию интенсивности принимаемой прямой радиоволны, пришедшей от радиостанции по кратчайшему расстоянию. Если имеется возможность выбора, то следует выбирать для пеленгования радиостанции, работающие не более длинных волн (низких частотах), так как с ростом длины волн влияние ионосферы на условия распространение уменьшается. “Береговой эффект” Погрешность пеленгования, обусловленные изменение направления распространение радиоволн при их прохождении через границу раздела сред с различными электрическими свойствами, возникают в тех случаях, когда полет осуществляется вблизи береговой черты.
Рис. 7. Эффект береговой рефракции радиоволн.
При этом радиоволна, переходящая береговую черту, преломляется (рис. 7) и приходит на ВС с направления, отличного от истинного направления пеленгуемой радиостанции, вследствие чего в показаниях АРК появляется устойчивая погрешность, значения которой могут достигать 5˚. Это явление называют и береговым эффектом. Величина погрешности будет тем больше, чем меньше угол, под которым радиоволна пересекает береговую черту. Когда этот угол равен 90˚, радиоволна не преломляется и погрешность пеленгования отсутствует. Расчеты показывают, что практически погрешности, вызванные этим эффектом, следует учитывать только когда угол между усредненной береговой чертой и направлением распространение радиоволны составляет 20˚. Кроме того, с удалением от берега, а также с увеличением высоты полета или рабочей частоты эти погрешности уменьшаются. Они имеют практически заметную величину только при высоте полета, меньше нескольких длин рабочей волны, что для современных АРК приблизительно соответствует высотам от 6000 до 60 м. Наименьшая высота полета, обеспечивающая отсутствие погрешности пеленгования может быть определена на формуле:
Hmin ≥ 900000/fp,
где: - H min – истинная высота полета, f p- рабочая частота, кГц. При этом H min будет больше трех длин рабочей волны.
Ошибка отметки пролета радиостанции Как следует из принципа работы АРК в режиме автоматического пеленгования, в момент пролета над радиостанцией показания радиокомпаса должны измениться на 180˚. Но при малых расстояниях между ВС и радиостанцией ухудшается эффективность приема ее сигналов направленной антенной, вследствие чего показания АРК становятся неустойчивыми. Область неустойчивых показаний имеет вид пространственного конуса с вершиной в точке расположения антенны пеленгуемой радиостанции (рис. 8).
Рис 8. Ошибка отметки пролета радиостанции
Радиус основания этого конуса зависит от высоты полета, а также от типа и места расположения на ВС ненаправленной антенны и от точности регулировки некоторых цепей самого АРК, так что длина этого радиуса может быть равна двум - трем высотам полета. В зависимости от указанных факторов отметка момента пролета (изменение КУР на 180˚) может быть зафиксирована до или после самого момента пролета радиостанции. Изменение показаний АРК при полете над радиостанцией с опережением или запаздыванием для разных ВС одного типа является почти одинаковым, поэтому оно определяется опытным путем и при необходимости может быть учтено. “Горный эффект” Так называют иногда явления, воздействующие на АРК при полетах на сравнительно малых истинных высотах полета над горами. В этих условиях рамочная антенна АРК наряду с прямым сигналом от пеленгуемой радиостанции принимает многократно преображенные от неровностей рельефа радиоволны. Погрешности пеленгования, возникающие за счет “горного эффекта”, вследствие перемещения ВС над горами, все время изменяется, и стрелки указателей АРК в этом случае хаотически перемещаются по шкалам, делая отсчет КУР практически не возможным. Таким образом, сигналом о действии указанного эффекта может быть неустойчивость показаний АРК, которая особенно заметна при не больших высотах превышения над горами и при расположении ВС между пеленгуемой радиостанции и горным массивом. С увеличением истиной высоты полета ВС это явление быстро затухает. Если приводная радиостанция располагается вблизи горных массивов, то могут наблюдаться случаи изменения показаний АРК на 1800 не на траверсной плоскости, а вне ее на расстоянии 25…30 км от ПРС. Поэтому в горных районах показания АРК надо сопоставлять с данными счисления или сведениями о координатах, полученными от других навигационных средств. Практикуется также заблаговременный облет приводных радиостанций, располагаемых вблизи горных массивов, и определение тех зон или направлений, где наблюдается ложный траверз. Горный эффект наиболее сильно проявляется на удалении 10…40 км от горна высотах до 500 м в наиболее высокочастотной части рабочего диапазона. Эксплуатационные технические характеристики (ЭТХ) автоматических радиокомпасов ГА.
В гражданской авиации находят применение АРК следующих типов: АРК-15,-22,-25,-85, работающие в диапазоне ГМК и КМВ, и АРК-У2, работающий в диапазоне МВ. В таблице 1. представлены основные ЭТХ АРК ГА.
Таблица 1
Как видно изтаблицы 1, погрешность определения КУР лежит в пределах 1,5˚…3˚. Дальность действия АРК зависит от мощности пеленгуемой радиостанции, частоты настройки, характера подстилающей поверхности по трассе полета, уровня атмосферных помех и времени суток. Различают дальность действия АРК по пеленгу и приводу. Дальность действия попеленгу, это расстояние, в пределах которого обеспечивается определение угловых координат пеленгуемой радиостанции, с точностью, указанной в табл.1. Эта точность определяется в основном методическими погрешностями. Дальность действия по приводу – расстояние, в пределах которого осуществляется уверенный прием сигналов ПРС и возможен вывод на ПРС, хотя точность определения угловых координат оказывается ниже данных, приведенных в таблице 1, вследствие погрешностей, обусловленных особенностями распространения радиоволн ГМВ и КМВ на большие расстояния. Опыт показывает, что дальность действия АРК по приводу может достигать 500 км, а дальность действия по пеленгу 250…300 км. Если АРК используется для контроля пути по направлению, то для обеспечения полета в пределах установленной ширины трассы 2в с заданной вероятностью дальность, на которой возможно применение АРК определяется выражением Dдоп=30b/σпс,
При σ˚пс=1,5…3 и 2в=10 км дальность применения АРК для контроля пути по направлению не превысит 100…50 км. Специфической особенностью АРК является зависимость их дальности действия от высоты полета ВС. В областях пространства, примыкающих к земле (т.е. на низких высотах) происходит более сильное поглощение (и затухание) радиоволн, чем в областях удаленных от земли (на больших высотах). Так как мощность ПРС ограничена, то уровень сигнала на определенном удалении от ПРС оказывается зависящим от полета ВС. По этой причине дальность действия АРК по приводу на высоте полета 1 км не менее 180 км, на высоте 5 км не менее 250 км, на высоте полета 10 км 250…300 км и более. Однако степень поглощение радиоволн земной и водной поверхностью различно. Она минимальна над морской поверхностью, поэтому дальность приема сигналов ПРС при полете над морем не зависит от высоты полета ВС. Радиокомпас АРК-У2 позволяет вести пеленгование бортовых радиостанции и аварийных радиомаяков. Он предназначен для привода поисковых ВС в точку нахождения ВС, потерпевшего аварию, а также для обеспечения встречи ВС в воздухе. В этом случае используются радиосредства, работающие в диапазоне МВ, где дальность действия ограничивается дальностью прямой радиовидимости.
Dпр =3, 57 (
где D пр. – дальность прямой радиовидимости, км. Hпол. – высота полета ВС, м; Hант - высота антенны, пеленгуемой радиостанции, м.
|


 = p - q,
= p - q, 


 где: D доп – допустимое расстояние от ВС до ПРС; b – половина ширины трассы; σ˚пс- погрешность определения пеленга с помощью АРК.
где: D доп – допустимое расстояние от ВС до ПРС; b – половина ширины трассы; σ˚пс- погрешность определения пеленга с помощью АРК. ),
),


