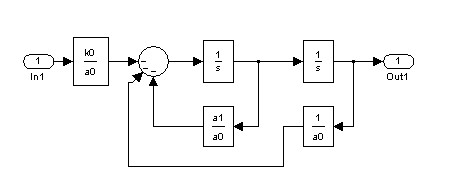
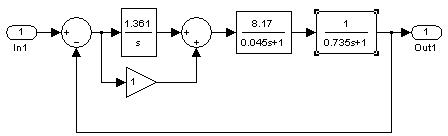
Синтез аналоговой схемы и ПИ-регулятора для получения апериодического переходного процесса с 5%-ным перерегулированием.Исходные данные курсового проекта для расчёта системы (a0 = 0.033 (c^2); a1 = 0.78 (c))
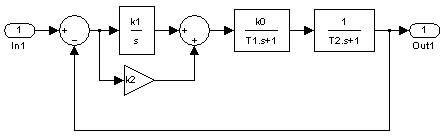
рис. 1 Упростим схему, используя правила преобразования структурных схем:
Подставляя числовые значения получаем передаточную функцию системы:
Разложим знаменатель на множители, для этого найдём корни уравнения:
После упрощений получаем окончательный вид передаточной функции:
Введём в схему ПИ-регулятор:
рис. 2 Запишем передаточную функцию аналогового PI-регулятора согласно с рис.2:
Если принять K2/K1=0.735, то можно компенсировать влияние бОльшей постоянной времени. Учитываю эту замену найдём передаточную функцию преобразованной системы с ПИ-регулятором и приведём полином в знаменателе к «классическому» виду.
Для определения недостающих параметров воспользуемся стандартной моделью второго порядка, характеристическое уравнение которой имеет вид:
Показатели качества стандартной системы при перерегулировании σ = 5%: ξ = 0.707, t0=3τ.
Приравнивая коэффициенты характеристического уравнения расчетной системы с коэффициентами характеристического уравнения эталонной системы можно определить неизвестные параметры регулятора:
Из первого условия можно определить τ:
Произвольно выбираем значение коэффициента K2=1. Hаходим недостающие коэффициенты:
Полностью рассчитанная аналоговая система:
рис. 3
|