
Синтез цифровой системы по аналоговой модели, построение структурной схемы новой системы.Для синтеза цифровой системы по аналоговой модели, найдём z-изображения передаточных функций каждого звена. Используем пакет MatLab: %Нахождение z-изображений динамических звеньев w1=tf([1.36], [1 0]); w2=tf([8.17], [0.045 1]); w3=tf([1],[0.735 1]); 'D(z)' Wp1=c2d(w1+1,0.002,'zoh') 'TF1(z)' Wp2=c2d(w2,0.002,'zoh') 'TF2(z)' Wp3=c2d(w3,0.002,'zoh') Результат: D(z) Transfer function: z - 0.9973 ---------- z - 1 Sampling time: 0.002 ans = TF1(z) Transfer function: 0.3552 ---------- z - 0.9565 Sampling time: 0.002 ans = TF2(z) Transfer function: 0.002717 ---------- z - 0.9973 Sampling time: 0.002 >> Время квантования должно быть достаточно малым, по сравнению с инерционностью исходной аналоговой системы. Так как в исходной системе наименьшая постоянная времени равна 0.045, то и выбран столь малый шаг квантования. Это значение было в дальнейшем проверено экспериментально – бОльшая величина приводила к выходу из заданного диапазона перерегулирования. Таким образом, можно составить структурную схему эквивалентной цифровой системы (рис. 7).
рис. 7 Необходимо заметить, что пакет MatLab выдал значения постоянных с округлением до четырёх значащих цифр после запятой. Этого оказалось недостаточно для точного моделирования, система опять не укладывалась в 5%-ное ограничение по перерегулированию. По этому константы были вычислены вручную, и заменены в знаменателях. Результат моделирования цифровой системы в приложении Simulink (рис. 8 - 10):
На рисунке 9 дан снимок с встроенного в Simulink осциллографа, по нему можно сделать вывод о нормальном прохождении переходного процесса. На рисунке 10 дан увеличенный снимок – можно видеть, что несмотря на потери точности при округлении данных, система осталась в 5%-ном диапазоне перерегулирования. Таким образом, можно считать синтез цифровой системы успешным. Сравнение полученного переходного процесса с переходным процессом аналоговой системы будет сделано ниже.
|
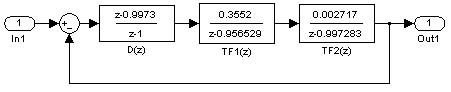
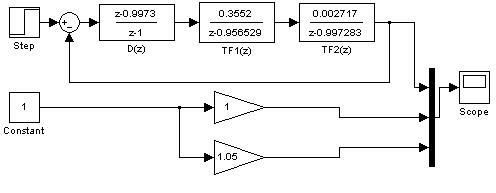 рис. 8
рис. 8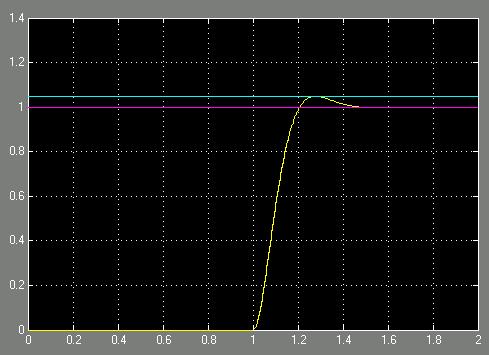 рис. 9
рис. 9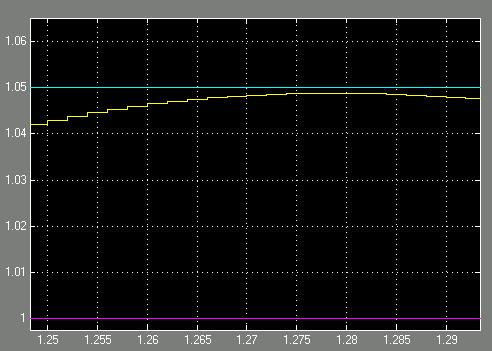 рис. 10
рис. 10


