Реализация математической модели аналоговой системы в координатах вход-выход и в координатах состояния с помощью пакетов MatLab, MathCAD.Для реализации модели в пространстве вход-выход достаточно найти передаточную функцию всей системы, с регулятором и обратной связью. Опять с помощью правил преобразования получаем передаточную функцию системы:
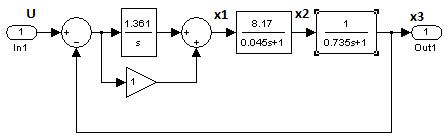
Для реализации модели в пространстве состояний используем синтезированную ранее структурную схему с введёнными дополнительными переменными состояния:
рис. 4
Матрицы состояний соответственно:
Приступим к непосредственной реализации систем. Листинг программы MatLab t=0:0.005:1; k0=4.037; k1=2.72; k2=2; a0=0.033; a1=0.78; T1=0.045; T2=0.735; %1-Система заданна структурной схемой %Передаточные функции отдельных звеньев w1=tf([k1],[1 0]); w2=tf([k2],[1]); w3=tf([k0],[a0]); w4=tf([1],[1 0]); w5=tf([a1],[a0]); w6=tf([1],[1 0]); w7=tf([1],[a0]); %Вычисляем передаточную функцию системы w45=feedback(w4,w5); w456=series(w45,w6); w4567=feedback(w456,w7); w34567=series(w3,w4567); w12=parallel(w1,w2); w1234567=series(w12,w34567); w_sys1=feedback(w1234567,1); % 2-Система заданная моделью в пространстве состояний A=[0 0 -2.721; 89.72 -22.2 -179.44; 0, 1.36, -1.36;]; B=[2.721; 179.44; 0]; C=[0 0 1]; D=[0]; w_sys2=ss(A,B,C,D);
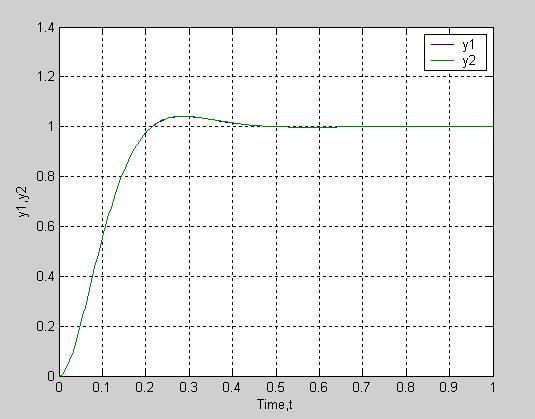
%Графики переходных характеристик [y1,t]=step(w_sys1,t); [y2,t]=step(w_sys2,t); plot(t, y1, t, y2), grid legend('y1',... 'y2') xlabel('Time,t'), ylabel('y1,y2') Результат программы на рис.5, графики полностью совпадают. Листинг программы в MathCAD:
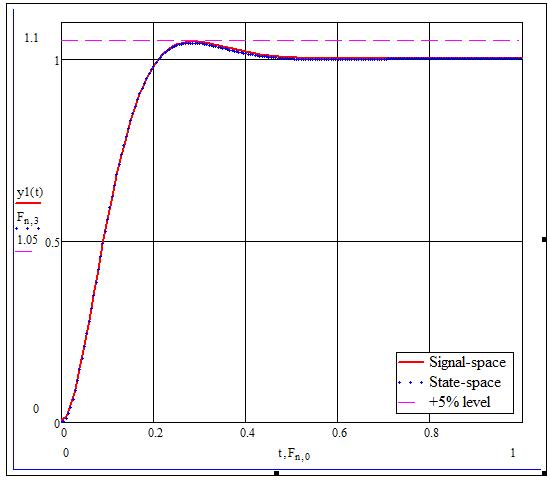
Результат программы на рис. 6, графики полностью совпадают.
рис. 5
рис. 6
|