Автоматичне керування поливом 1 страница
Автоматичне керування поливом в ангарних теплицях за допомогою обладнання УТ-12 здійснюється роздільно для нижньої і верхньої систем поливу. Вода для поливу надходить через нижню систему труб, що використовують також для подачі розчинів мінеральних добрив. Труби для поливу можна встановлювати на висоті від 0 до 2,2 м. Поливна вода розподіляється по групі труб через електромагнітний вентиль. У кожній теплиці встановлена група вентилів, що по черзі включається на 2...4 хв. в одній теплиці, потім в інший і т.д.
Рис. 5.6. Принципова схема керування температурою поливної води
Зволоження повітря в теплиці відбувається за рахунок короткочасного (на 10...30 с) відкриття вентилів системи труб верхнього поливу. Висота розміщення системи верхнього поливу не змінюється. Воду, використовувану для поливу і зволоження, попередньо підігрівають до заданої температури. Система автоматичного керування температурою поливної води розміщається в шафах ШУ3, а в четвертій шафі – устаткування керування насосами і регулювальним клапаном КП. Вона працює в такий спосіб (рис. 5.6). Датчик температури поливної води ВК2 і задатчик R1 температури в діапазоні від 0 до 40 °С приєднують до блоку регулюючого приладу БРП1. При відхиленні температури від заданому на ±1° спрацьовують відповідні граничні елементи в блоці БРП2 і включається реле KV1 чи KV2. При зниженні температури на 1° включається реле KV1, що викликає спрацьовування виконавчого механізму ВМ, що збільшує через регулюючий клапан КР впуск гріючої води у підігрівник поливної води ППВ. При підвищенні температури на 1° включається реле KV2, що подає сигнал до ВМ на зменшення пропуску води, що гріє, через регулювальний клапан. Для виключення перерегулювання при зміні відкриття виконавчого механізму застосовують імпульсний переривник – генератор імпульсів БD1 і реле KV3. На реле KV3 від блоку БD1 надходять через кожні 20 с імпульси з установленої при налагодженні тривалістю від 1 до 10 с. Зміна впуску води, що гріє, відбувається короткочасно тільки при замкнутому положенні контактів реле KV3 і KV1 чи KV2, що виключає перерегулювання температури через інерційність ППВ. Логометр Р за допомогою датчика ВК1 вимірює температуру поливної води й обмежує її максимальне значення у випадку виникнення аварійної ситуації. При досягненні максимально припустимого значення температури води логометр розмикає контакти Р1 і замикає контакти Р2, що викликає форсоване закриття регулюючого клапана КР. Потім при зниженні температури води до встановленого значення контакти логометра повертаються у вихідне положення і вводять у роботу систему регулювання температури води. Сигнальні лампи показують наступне: HL1 – температура води менше заданої, HL2 – більше заданої, HL3 – обрив і HL4 – коротке замикання в колі датчиків. Схема автомата полива наведена на рисунку 5.7. Програму поливу 12 теплиць набирають тумблерами SA2...SA24, програму зволоження – тумблерами SA1...SA23. Оскільки системи поливу і зволоження діють роздільно, а схеми керування ними аналогічні, то тут розглянемо тільки схему автоматичного керування поливом. Тривалість поливу однієї теплиці (2...4 хв) установлюють перемикачем SA1, а кратність поливу (1...5) – тумблерами SA25...SA29. За допомогою реле KV1...KV12 і тумблерів SA2...SA24 включають відповідні групи електромагнітних вентилів поливу УА1...УА12 через проміжні реле, розташовані в місцевих шафах керування ШУМ. Вентилі можуть бути включені вручну за допомогою тумблера SA30 і перемикача SA31. Систему поливу включають кнопкою SB чи по ланцюзі через реле KV14 (рис. 5.9) у заданий час доби. При цьому включаються реле KV18 і KV19 (рис. 5.7), останнє своїми контактами подає від блоку живлення БЖ напругу в схему автомата, а всі тригери елементів D1...D13 приходять у вихідне положення, і спрацьовують реле KV1 і KV13. Слідом за цим спрацьовує реле KV20 при включеному тумблері SA25 “Кратність поливу 1”. Контакти реле KV20 включені паралельно контактам реле KV19 і забезпечують підключення блоку БЖ до автомата при відпусканні кнопки SB.
Рис. 5.7. Принципова електрична схема автомата УТ-12 поливу грунту Одночасно з натисканням кнопки SB і подачею напруги на схему від блоку БДЗ спрацьовує реле KV23, що включає основний насос поливу НП через проміжне реле, розташоване в шафі ШУМ. Якщо пуск насоса не відбувся, то контакти реле тиску води SP1 залишилися замкнутими. У цьому випадку на елемент D через контакти KV21 надходить сигнал “ 1 ”, що через 1 хв за допомогою блоку кільцевого лічильника БДЗ відключає реле KV23 і підключає реле KV24. Реле KV24 подає команду на включення резервного насоса поливу НП. Якщо протягом наступної хвилини тиск у системі поливу не з’явиться, то реле KV24 відключиться, а реле KV25 вмикає ревун НА і сигнальну лампу HL “Аварія”. Насоси-дозатори НД використовують для подачі розчинів мінеральних добрив. З включенням насоса НП починається полив першої теплиці. Через контакти КV1 і включений перемикач SA2 подається сигнал “ 1 ” (–24 В) на вхід елемента D10, а з виходу елемента D11 сигнал “ 1 ” надходить на елементи D1 і D12. На вихід елемента D1 подаються також сигнали з періодом 2 с. від генератора імпульсів БД1. Період цих сигналів збільшується тригерами, виконаними на елементах D2...D7. У залежності від положення перемикача SA1 “Час поливу” на елемент D12 надходять сигнали “ I ” з періодом 0,5; 1; 2; 4; 8 чи 16 хв, що потім через елементи D12 і D13 надходять на блок дешифрації БД2 (кільцевий лічильник). Кільцевий лічильник викликає почергове спрацьовування реле KV1...KV12, що забезпечують послідовний полив 12 теплиць (ділянок) з інтервалом, рівним обраного часу поливу. Якщо полив якоїсь ділянки не передбачений, то відповідний тумблер з SA2...SA24 не включений. У цьому випадку при спрацьовуванні відповідного реле з KV1...KV12 на вхід елемента D10 “НЕ” надходить сигнал “ 0 ”, а з його виходу сигнал “ 1 ” надходить на входи елементів D8 і D9, що реалізують логічну функцію “ І ”. Тому що на вхід елемента D8 надходять також імпульси з періодом 2 с від блоку БД1, то через елемент D9 на вхід D13, а потім на дешифратор БД2 сигнал “ 1 ” приходить через 2 с. Цей імпульс викликає переключення дешифратора БД2, і час проходу ділянки, що неполивається, скорочується до 2 с. Після спрацьовування реле KV12, що забезпечує полив останньої дванадцятої ділянки, відключається реле KV13, і включається реле KV14. Це забезпечує запуск нового циклу поливу тих же ділянок у тій же послідовності. Процес повторюється доти, поки не реалізується задана тумблерами SA25...SA29 кратність поливу. Після цього реле KV20 відключається і знімає напругу живлення зі схеми автомата поливу. Робота автомата поливу припиняється.
5.3.2. Автоматичне управління концентрацією розчину мінеральних добрив
Система автоматичного керування концентрацією розчину мінеральних добрив (рис. 5.8) призначена для контролю концентрації та стабілізації її в межах, заданих агротехнічними вимогами. Концентрований розчин мінеральних добрив готують в спеціальному басейні Б, звідки насоси-дозатори НД подають його через регулюючий клапан КР1 в поливну воду. Насоси НД вмикаються періодично від пускових реле аналогічно вмиканню поливних насосів НП. Концентрація добрив вимірюється по електропровідності живильного розчину в магістральному трубопроводі за ділянкою змішування концентрованого розчину і поливної води. У трубопроводі встановлено датчик ДД кондуктометричного типу з температурною компенсацією, що підключений через аналізатор добрив АД до двопозиційного регулятора РП. Регулятор керує виконавчим механізмом ВМ1 за допомогою реле KV1 “Концентрація більше” і KV2 “Концентрація менше”. Якщо концентрація знаходиться в межах заданої (0,02–0,035 См/см), регулятор відключає виконавчий механізм. Враховуючи суттєву величину транспортного запізнення, для поліпшення якості двопозиційного регулювання використовується імпульсний перервник: реле KV3 і генератор імпульсів БД з періодом 20 с. Іншим, не менш важливим, завданням регулювання є стабілізація кислотно-лужної реакції розчину (рН), яку регулюють на етапі приготування концентрованого розчину в межах 5,4–6,4 за допомогою електродного датчика потенціометричного типу ДрН, точність якого досягає 0,1 рН. При відхиленні рН від заданого виконавчий механізм ВК2 змінює ступінь відкриття регулюючого клапана КР2. Це веде до зміни подачі з бака БК спеціального розчину, що коригує значення рН в басейні Б. Мішалка М прискорює вирівнювання концентрації мінеральних добрив і рН по всьому об’єму.
Рис. 5.8. Схема автоматичного управління концентрацією мінеральних добрив Такі системи регулювання концентрації добрив вирішують задачу стабілізації режимних параметрів на вході в об’єкт і задовільно працюють лише при технології вирощування рослин з циркуляцією розчину поживних речовин (гідропоніка, водна, тонкоплівкова культура). Ґрунтова або субстратна технологія, які не передбачають повернення живильного розчину в систему, потребують урахування буферності, водоутримуючої здатності і можливості засолення субстрату. У цьому випадку необхідний зворотній зв’язок по параметрах субстрату шляхом установки датчиків безпосередньо в ньому. Проблема полягає у відсутності надійних датчиків. 5.3.3. Автоматичне управління підживленням вуглекислим газом і досвіченням рослин
Додаткове опромінювання і вуглекислота потрібні рослинам для підсилення фотосинтезу. Вміст вуглекислоти в теплиці підвищують шляхом спалення природного газу в спеціальних пальниках (газогенератори Г–4,5) або відпрацьованим газом з котельної. Управління здійснюється за заданою програмою з 24-годинним циклом за допомогою реле часу (рис. 5.9). Генератор імпульсів БД1 подає імпульси періодичністю 2 год на вхід 12-позиційного кільцевого лічильника БД2. Реле KV1—KV12 спрацьовують з інтервалом 2 год, забезпечуючи роботу проміжного реле KV15. Реле KV15 керує газогенераторами СО2, розміщеними в теплицях. Після відключення реле KV12 завершує керування подачею СО2 в останню теплицю, спрацьовує реле KV13. Контакти реле KV13 подають нульовий потенціал до всіх тригерів блоку БД1, що повертає їх у вихідний стан. Потім знову підключається реле KV1, і починається новий добовий цикл. Тригери можна перевести у вихідний стан, натиснувши кнопку SВ “Установка часу 12 ч”. Номера теплиць, у які необхідно подавати СО2, набирають тумблерами SA39...SA50, а тривалість підживлення СО2 встановлюють тумблерами SА1...SA12, причому перший включений тумблер визначає початок підживлення, останній – закінчення. За допомогою тумблера SA25 вручну керують підживленням СО2 без обмеження в часі. Керування досвіченням здійснюється за допомогою реле КV16 у розсадних теплицях.
Рис. 5.9. Схема автоматичного управління досвіченням і підживленням вуглекислим газом
Якість регулювання забезпечується за рахунок двох автономних двопозиційних регуляторів, вставки яких відрізняються на 0,04 %. Це забезпечує ввімкнення виконавчих механізмів і регулюючих клапанів двох груп газогенераторів. Вмикання схеми підживлення СО2 автоматично блокується при зниженні рівня освітленості, при відкритих фрамугах і підвищеній відносній вологості в теплиці. Досвічення рослин здійснюють за допомогою опромінюючих установок ОТ-400 з ртутними лампами ДРЛФ-400 в програмному або автоматичному (за допомогою датчика освітленості) режимі управління. При рівні освітленості нижче 5 клк п’ять опромінюючих установок в розсадній теплиці вмикаються з регульованим інтервалом від 0,5 до 6 хв. Це виключає токові сплески, що можуть виникати при одночасному вмиканні всіх ламп. Крім того, пороговий пристрій має затримку 1–3 с, що забезпечує нечутливість до короткочасних спалахів світла. Схема автоматичного керування досвіченням працює аналогічно схемі керування підживлення СО2. Контакти реле KV16 підключають фазу А через тумблери SA52...SA63 “Ділянка досвічення” до розподільних щитків РУ керування досвіченням. Тривалість досвічення визначається в годиннах і дорівнює подвійному одночасно включених тумблерів SA13...SA24 “Досвічення”, а початок і кінець досвічення визначаються першим і останнім з включених тумблерів. Ручне керування досвіченням здійснюють тумблерами з розподільних щитків керування РУ. Реле KV1...KV12 і KV14 разом із блоком дешифрації БДЗ і тумблерами SA64; SA27...SA38 здійснюють “Включення поливу в заданий час” через реле KV18 (рис. 5.9, а). За допомогою тумблерів SA27...SA38 (рис. 5.9) набирають ділянки, необхідні для поливу. Блок БДЗ забезпечує витримку часу у включеному стані до 5 с, після чого реле KV14 знеструмлюється і сигнал “Пуск” з автомата поливу знімається.
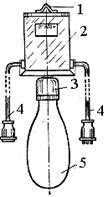
Питання для самоконтролю 1. Як здійснюється полив в ангарних теплицях за допомогою устаткування УТ-12? 2. Як здійснюється зволоження повітря в ангарних теплицях за допомогою устаткування УТ-12? 3. Поясніть роботу принципової електричної схеми керування підігрівом поливної води. 4. Поясніть роботу принципової електричної схеми керування автомата поливу в ангарній теплиці. 5. Поясніть роботу принципової електричної схеми керування управління концентрацією мінеральних добрив в ангарній теплиці. 6. Поясніть роботу принципової електричної схеми керування автоматичного управління досвіченням і підживленням вуглекислим газом в ангарній теплиці. ТЕСТИ 1. Як здійснюється підігрів поливної води в ангарних теплицях? A. Водонагрівачем. B. Змішуванням гарячої води з холодною. C. На котельні. 2. Використовуючи принципову електричну схему керування підігрівом поливної води в ангарних теплицях, вкажіть призначення датчика температури ВК2. A. Для виміру температури холодної води. B. Для виміру температури поливної води. C. Для виміру температури гарячої води. 3. Використовуючи принципову електричну схему керування підігрівом поливної води в ангарних теплицях, вкажіть призначення виконуючого механізму ИМ. A. Для автоматичного керування клапаном КР для подачі води B. Для автоматичного керування регулюючим клапаном КР для подачі води в підігрівник. C. Для автоматичного керування регулюючим клапаном КР для подачі гарячої води в підігрівник поливної води. 4. Використовуючи принципову електричну схему керування автомата поливу в ангарних теплицях, вкажіть, як задається програма поливу та зволоження? A. Набирають тумблерами SA2...SA24, програму зволоження – тумблерами SA1...SA23 B. Набирають тумблерами SA25...SA29 C. Набирають тумблерами SA25...SA29, програму зволоження – тумблером SA1 5. Використовуючи принципову електричну схему керування автомата поливу в ангарних теплицях, вкажіть призначення електромагнітних вентилів поливу УА1...УА12. A. Для автоматичної подачі води в теплицю. B. Для подачі гарячої води в теплицю. C. Для автоматичної подачі поливної води в теплицю з заданою тривалістю і кратністю. 5.4. АВТОМАТИЗАЦІЯ УСТАНОВОК ДЛЯ ОПРОМІНЕННЯ РОСЛИН В УМОВАХ ЗАХИЩЕНОГО ГРУНТУ Для створення необхідного світлового режиму в теплицях використовують опромінюючі установки. Ці установки повинні спрямовувати весь світловий потік джерела випромінювання безпосередньо на корисну площу стелажа. Крім того, випромінювач необхідно наблизити до рослин на мінімально допустиму відстань. Для опромінення рослин в теплицях вітчизняна промисловість випускає тепличні опромінювачі типу ОТ-400 з лампою ДРЛФ-400, ОГС01 “Фотос” з лампами ДРИ 1000-6, ДРИ 2000-6 та ДРИ 3500-6, установку опромінювання рослин у теплицях УОРТ-2-3000 з металогенною лампою ДМЗ-3000, систему опромінення рослин у теплицях СОРТ1 з лампою ДКсТЛ 10 000 та інші. На рис. 5.10 зображено опромінювач типу ОТ-400. Він складається з лампи ДРЛФ-400, корпуса з баластним пристроєм, фарфорового патрона, вузла для підвішування, двох відрізків шлангового кабелю. Один відрізок кабелю обладнаний розеткою, а другий – вилкою. Вилка і розетка дають можливість об’єднувати в групу з послідовним живленням до п’яти опромінювачів.
Рисунок 5.10. Опромінювач ОТ-400: 1 – вушко для підвішування; 2 – пускорегулюючий апарат (ПРА); 3 –фарфоровий патрон; 4 – кабель; 5 – лампа типу ДРЛФ-400
Установки СОРТ1, ОГС01, УОРТ-2 дають можливість забезпечити необхідний для розвитку рослин світловий потік при меншій більш як у два рази витраті електроенергії порівняно з опромінювачами типу ОТ-400. Опромінювальні установки, що використовуються в теплицях, можуть бути стаціонарними і пересувними. Робота принципіальної електричної схеми опромінювача ОТ-400 (рис. 5.11) полягає в слідуючому. Напруга на установку подається вмиканням автоматичного вимикача QF і через запобіжник поступає на перемикач режимів SA. Він має три положення: “ А ” – автоматичний режим, “ О ” – вимкнено, “ Р ” – ручний режим.
Рис. 5.11 Принципова електрична схема керування опроміненням рослин в теплиці установкою ОТ-400МИ
При автоматичному режимі перемикач SA встановлюємо в положення ” А ”. Напруга керування подається на котушку програмного реле часу КТ1. Воно своїм контактом, в заданий час доби, замикає коло і подає напругу керування на котушку магнітного пускача КМ. Магнітний пускач КМ замикає свої силові контакти і подає напругу на пускорегулювальні апарати опромінювальних ламп ЕL1…EL15. Додатковий контакт магнітного пускача КМ замикається і подає напругу на котушки проміжних реле КV1 та реле часу КТ2. Замикаючі контакти проміжного реле в колі пускорегулювальних апаратів замикаються і заряджають конденсатор С до напруги пробою розрядника FV. У момент пробою розрядника по первинній обмотці трансформатора ТV2 протікає струм. У вторинній обмотці трансформатора ТV2 виникає імпульс напруги з амплітудою до 2...3 кВ, який забезпечує виникнення розряду у внутрішній кварцовій колбі. Час розігрівання лампи становить 2...4 хв., повторне запалювання можна здійснити лише через 5...10 хв. залежно від умов охолодження. Розмикаючі контакти проміжного реле вимикають котушки своїх реле після подачі напруги на пускорегулювальні апарати. По закінчені запалювання ламп контакти реле часу КТ2 в колі проміжного реле вимикають котушку КV1. А другим своїм контактом вимикається сам. В ясний світловий день контакт фотореле К розмикається і вимикає магнітний пускач КМ, а він опромінювальні лампи, що приводить до економії електроенергії. Фотореле К має фоторезистор ВL, який знаходиться всередині приміщення теплиці, але не попадає під дію світлового потоку випромінювальних ламп. При ручному керуванні перемикач SA встановлюємо в положення “ Р ”. Натискаючи пускову кнопку SB2 подається напруга на котушку магнітного пускача КМ. Він своїми силовими контактами подає напругу на лампи опромінювальної установки, а додатковим контактом шунтує кнопку SB2. У ручному режимі вимикання установки здійснюється за допомогою кнопки SB1 “Стоп”, або поставивши перемикач SA в положення “ О ”. Лампа НL, яка знаходиться на шафі керування, сигналізує про вмикання котушки магнітного пускача КМ і відповідно про подачу напруги на лампи опромінювальної установки.
Питання для самоконтролю 1. Для чого використовують опромінюючі установки в теплицях? 2. Які тепличні опромінювачі використовуються для опромінення рослин? 3. З чого складається опромінювач типу ОТ-400? 4. Поясніть роботу принципової електричної схеми керування тепличним опромінювачем типу ОТ-400? ТЕСТИ
1. Які лампи використовуються в тепличному опромінювачі типу ОТ-400? A. Метало генною лампою ДМЗ-3000. B. Лампою ДРЛФ-400. C. Лампою ДКсТЛ 10000. 2. Який пристрій потрібно використовувати для автоматичного керування опромінювачами в теплиці по заданій програмі? A. Програмне реле часу. B. Фотореле з фоторезистором. C. Реле затримки часу. 3. Який пристрій потрібно використовувати для автоматичного керування опромінювачами теплиці залежно від освітленості? A. Фотореле з фоторезистором. B. Програмне реле часу. C. Реле затримки часу. 4. За допомогою принципової електричної схеми ОТ-400МИ вкажіть, які засоби автоматизації використовуються в автоматичному режимі роботи? A. Програмне реле часу. B. Фотореле з фото резистором, програмне реле часу, реле затримки часу. C. Фотореле з фоторезистором, реле затримки часу. 5. За допомогою принципової електричної схеми ОТ-400МИ вкажіть, для чого використовується фотореле К з фотодатчиком ВL? A. Для автоматичного керування опромінювачем по програмі. B. Для ручного керування опромінювачем залежно від освітленості зовні приміщення. C. Для автоматичного керування опромінювачем залежно від освітленості в приміщені. 6. Використовуючи принципову електричну схему ОТ-400МИ, вкажіть несправності, якщо не вмикається котушка магнітного пускача КМ тільки в заданий час доби? A. Обрив в колі перемикач SA, фотореле К, фотодатчик ВL. B. Обрив в колі живлення програмного реле часу КТ; перемикач SA. C. Обрив в колі живлення програмного реле часу КТ; перемикач SA, контакт КТ або механічна поломка.
5.5. АВТОМАТИЗАЦІЯ МІКРОКЛІМАТУ В ТЕПЛИЦЯХ ЗА ДОПОМОГОЮ ПРОГРАМНИХ КОНТРОЛЕРІВ
Програмні контролери та регулятори, в даний час, широко використовуються для підтримання мікроклімату. Їх можна програмувати не тільки по температурі, а у часі на весь період вирощування рослин в теплицях. За допомогою інтерфейсу підключати до ПК та регіструвати, контролювати показники та коректувати технологічні параметри вирощування рослин. Регулятор температури і вологості, програмований за часом, МПР51-Щ4 призначений для управління багатоступінчатими температурно-вологісними режимами технологічних процесів (рис 5.12). Застосувується МПР51 як вимірник-регулятор температури і вологості, вимірник-регулятор температури і різниці температур, двохканальний вимірник-регулятор температури з додатковим каналом сигналізації. Регулятор температури і вологості виконує наступні автоматичні функції: · вимірювання трьох параметрів: температури “сухого” термометра, Тсух; температури “вологого” термометра, Твл.; температури повітря, Тпов; · обчислення двох додаткових параметрів: різниці температур; вологості психрометричним методом (за свідченнями “сухого” і “вологого” термометрів); · два ПІД-регулятори для підтримки будь-яких двох з п’яти вище перелічених величин з високою точністю; · чотири вихідних реле для підключення ТЕНів, охолоджувальних систем, засувок і інших виконавчих пристроїв · регулювання за заданою користувачем програмою;
Рис. 5.12. Приклад використання регулятора температури і вологості, програмований за часом, МПР51-Щ4
· додаткове реле і 8 транзисторних ключів: для сигналізації про аварію і про закінчення виконання програми; для управління додатковим обладнанням; · автонастройка ПІД-регуляторів; · рівні захисту настройок приладу для різних груп фахівців (налагоджувачів, технологів тощо); · реєстрація контрольованих параметрів на ПК через адаптер мережі ОВЕН АС2 по інтерфейсу RS-232; · вбудований інтерфейс RS-485 по замовленню; · конфігурація на ПК за допомогою програми-конфігуратора (для підключення до ПК використовується спеціальний кабель). Регулятор МПР51-Щ4 має три входи для вимірювання температур: датчики температури Тсух, Твол. і Тпов і підключають до входів 1...3. Прилад має дві модифікації входів: для підключення датчиків ТСМ/ТСП опором 50 Ом; та для підключення датчиків ТСМ/ТСП опором 100 Ом, а також R100 використовуються резистивні датчики положення засувки, які підключаються до входів 4 і 5 (рис. 5.13)
Рис. 5.13. Функціональна схема приладу МПР51-Щ4 За допомогою 2 ПІД-регуляторів МПР51-Щ4 забезпечують точну підтримку будь-яких двох з п’яти виміряних і обчислених параметрів: Тсух, Твол, Тпов, ψ і ΔТ.(рис. 5.14).
Рис. 5.14. Схема підключень вимірювальних датчиків і датчиків положення заслінки
Для регулювання в МПР51-Щ4 використовуються 4 двопозиційних нормально розімкнених реле із струмом контактів на 4 А при 220 В, які попарно закріплені за ПІД-регуляторами. ПІД-регулятори можуть управляти різними виконавчими механізмами: двохпозиційним (ТЕНом, охолоджувачем) з використанням одного реле; трипозиційним (засувкою) з використанням двох реле (рис. 5.15). Для управління додатковим обладнанням або для сигналізації про хід технологічного циклу можна використовувати п’яте реле “Аварія” або 8 транзисторних ключів з відкритим колектором. Будь-яке незадіяне реле може використовуватися одним з компараторів для сигналізації про вихід контрольованої величини за задані межі або для двопозиційного регулювання. Зміна параметрів регулювання здійснюється за заданою користувачем програмою, що складається з послідовних кроків. На кожному кроці програми можуть бути задані: · вхідна величина (з п’яти можливих) для кожного ПІД-регулятора; · t вставки підтримуваних температур і вологості; · умови переходу до наступного кроку – за часом і (або) після досягнення заданого значення температури (вологості); · швидкість виходу на вставку; · режими проходження імпульсів для транзисторних ключів.
Рис. 5.15. Схема підключення транзисторних ключів і вихідних пристроїв
Програми запам’ятовуються в незалежній пам’яті приладу, а потім використовуються по вибору користувача. Кількість програм, що зберігаються в пам’яті приладу, залежить від числа кроків в кожній. Кількість кроків в програмі задається користувачем. Всього прилад може зберігати від 60 програм по 7 кроків кожна до 5 програм по 99 кроків кожна. Прилад видає сигнал “Аварія” замиканням контактів п’ятого реле приладу і свіченням світлодіода “Аварія”: · при виході будь-якого з регульованих параметрів за задані межі; · при обриві або короткому замиканні датчика; · при діагностиці неможливості продовження роботи; · після закінчення виконання програми. У разі тимчасового відключення живлення під час виконання програми подальші дії приладу визначаються по заданому користувачем алгоритму. Значення параметрів задаються за допомогою кнопок на лицьовій панелі приладу. Для кожної групи фахівців (налагоджувачів, технологів тощо) є своя група параметрів, доступ до якої можливий тільки через пароль.
|