Головна сторінка Випадкова сторінка
КАТЕГОРІЇ:
АвтомобіліБіологіяБудівництвоВідпочинок і туризмГеографіяДім і садЕкологіяЕкономікаЕлектронікаІноземні мовиІнформатикаІншеІсторіяКультураЛітератураМатематикаМедицинаМеталлургіяМеханікаОсвітаОхорона праціПедагогікаПолітикаПравоПсихологіяРелігіяСоціологіяСпортФізикаФілософіяФінансиХімія
Сутність та особливості управління оборотними активами
Дата добавления: 2015-08-17; просмотров: 575
|
|
Схема барабанной лебедки с ручным приводом представлена на рис. 1.

Рис.1. Схема барабанной лебедки с ручным приводом
Лебедка состоит из корпуса 1; рукоятей 2; ведущего 3, промежуточного 4 и ведомого 5 валов; барабана 6; быстроходной и тихоходной ступеней зубчатой передачи 7,8 и храпового механизма 9. Лебедка работает следующим образом. Один или несколько рабочих, воздействуя на рукояти 2 создают крутящий момент на валу 3, который посредством зубчатой передачи и промежуточного вала 4 передается на вал 5. При этом барабан 6, закрепленный на валу 5 вращается и канат, наматываясь на него, поднимает груз. Храповый механизм 9 обеспечивает удержание груза в поднятом состоянии без воздействия усилия на рукоятях.
Тяговое усилие лебедки с ручным приводом определяется из выражения:
 (1)
(1)
где Р – усилие, прилагаемое к рукояти одним или несколькими рабочими (Н), R – длина рукояти, мм; D – диаметр барабана лебедки, мм; i – общее передаточное число обеих ступеней; h – КПД лебедки.
Схема ручной рычажной лебедки представлена на рис. 2.
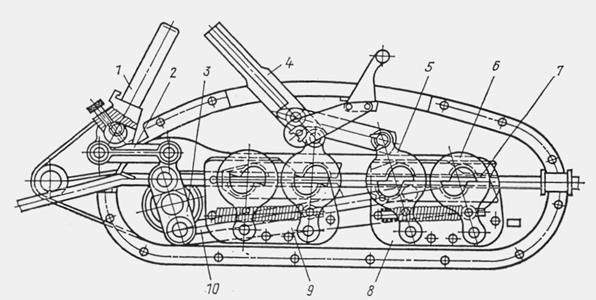
Рис. 2. Схема ручной рычажной лебедки
Работа лебедки основана на протягивании каната через тяговый механизм. Поворотом рукояти 1 переднего хода перемещается тяга 2 и поворачивается поводок 3. Поводок связан тягой 10 с корпусами переднего 9 и заднего 8 захватов. В корпусах захватов установлены серьги 5 и 6, в которых размещены сухари 7, охватывающие канат. При повороте рукояти 1 по часовой стрелке сухари захвата 9 освобождают канат и перемещаются вместе с серьгами по канату вправо. В это время сухари захвата 8 держат зажатым канат. При повороте рукояти 1 против часовой стрелки сухари захвата 9 зажимают канат и протаскивают его влево, в это время сухари захвата 8 освобождают канат. Рукоять 4 служит для осуществления заднего хода.
Основное преимущество такой лебедки – очень малый вес. К примеру, лебедка с тяговым усилием в 3 тс весит 55 кг, из которых 25 кг весит канат.
Схемы лебедок с электрическим приводом представлены на рис. 3.

Рис. 3. Лебедки с электрическим приводом: а) быстроходная; б) тихоходная
Лебедка состоит из рамы 1, на которой смонтированы электродвигатель 2, редуктор 3, барабан 4, тормоз 5. Валы электродвигателя и барабана соединены муфтой 6. Тихоходные лебедки могут оборудоваться открытой передачей, как показано на рисунке 3б. Известны конструкции лебедок, в которых в качестве передаточного механизма используются червячные редукторы.
Тихоходные лебедки, предназначенные для перетягивания груза по горизонтальной или близкой к ней плоскости могут быть выполнены без тормозного механизма (рис. 3 б).
Перематывающие лебедки (см. рис. 4) применяются при большой длине каната (в слипах, на траловых судах, в шахтных и башенных кранах) для снижения усилия в канате при многослойной намотке его на барабан, чем исключается раздавливание каната.

Рис. 4. Перематывающая лебедка
В этих лебедках барабаны 1 и 3 жестко связаны между собой зубчатой передачей 2. При вращении барабанов набегающий канат приходит на барабан 3. проходит по кольцевым канавкам обоих барабанов, охватывая их. Сбегающая ветвь каната с барабана 1 поступает на канатосборную катушку 6 и укладывается рядами с помощью канатоукладчика 7. При этом усилие в этой ветви значительно меньше, чем набегающей.
Канатосборная катушка приводится во вращение цепной передачей 4 с дисковой муфтой 5 предельного момента. Муфта компенсирует разницу скоростей намотки слоев каната, связанную с изменением радиуса слоев. Для разгрузки опор, на которые действуют большие стягивающие усилия каната, установлены распорные ролики 10. Привод лебедки осуществляется от электродвигателя 8 через редуктор 9 и открытые зубчатые передачи 2.
Одной из разновидностей тяговых лебедок являются электроошпили или каботаны.
Эти механизмы могут иметь горизонтально (рис. 5а) или вертикально (рис. 5 б, в) расположенный барабан 2.

Рис. 5. Электрошпили:
а – с горизонтальным барабаном; б, в – с вертикальным барабаном
Особенностью принципа действия электрошпилей является создание тягового усилия на канате 1 за счет сил трения о барабан. С этой целью канат, не имея жесткой связи с барабаном, огибает его в 3–4 витка. При этом его набегающая ветвь выбирается вручную или наматывается на вспомогательный барабан 6 через отклоняющий блок 4. В последнем случае для привода вращения барабана 6 служит электродвигатель 7 небольшой мощности. Вращение фрикционного барабана 2 обеспечивается основным электродвигателем 8 через цилиндрический редуктор 9 или червячную передачу 10. Работа электрошпиля протекает следующим образом. Для подтягивания груза (рабочий ход) рукоятка управления 3 контроллера 5 устанавливается в позицию «Навивка» и оба двигателя 7 и 8 начинают вращаться в одну сторону. При этом частота вращения двигателя 7 устанавливается автоматически в зависимости от скорости навивки каната на фрикционный барабан 2. При переводе рукоятки 3 в позицию «Сматывание каната» основной двигатель 8 и фрикционный барабан 2 начинают вращаться в обратном направлении, а направление вращения двигателя 7 не меняется, таким сочетанием вращения барабана создается противодействие сматыванию каната, благодаря чему он поддерживается в натянутом состоянии.
Фрикционные барабаны обычно имеют переменный диаметр, увеличивающийся к его краям, чем обеспечивается постоянное сбегание каната на середину барабана.
На практике наибольшее применение находят барабанные лебедки с электрическим приводом. В качестве привода может использоваться любой тип выпускаемых промышленностью двигателей. Однако наибольшее применение находят асинхронные трехфазные двигатели переменного тока с короткозамкнутым или фазным ротором. Двигатель с короткозамкнутым ротором дешевле, надежней, легче двигателя с фазным ротором. Однако недостатком этих двигателей является сложность регулировки скорости вращение и перегрев при повторно-коротковременном режиме работы. Требуемая мощность двигателя определяется в зависимости от веса поднимаемого груза и скорости его подъема.
Барабан – элемент грузоподъемных лебедок, предназначенный для наматывания каната и преобразования поступательного вращения груза во вращательное движение механизма. Барабаны делятся на цепные и канатные, для одинарных и сдвоенных полиспастов. Канатные по форме внешней поверхности разделяются на цилиндрические, конические и коноидальные. Цилиндрические бывают гладкие и нарезные. Нарезные используют для однослойной навивка каната. Нарезные барабаны обеспечивают равномерность поперечной нагрузки, действующей на канат при наматывании на барабан, что увеличивает срок службы каната.
Крепление каната на барабане осуществляется различными способами, из которых наибольшее распространение получило наружное крепление прижимной планкой.
Минимально допустимый диаметр барабана, измеряемый по средней линии зависит от диаметра каната, а требуемая длина – от конструкции и диаметра барабана, а также от длины и диаметра навиваемого на него каната.
Передаточный механизм. В качестве передаточного механизма в лебедках может использоваться открытая зубчатая передача, стандартные редукторы, цепная передача или комбинированный механизм, содержащий две любые из вышеназванных передач.
Наибольшее предпочтение отдается стандартным цилиндрическим редукторам. Типоразмер редуктора выбирается по требуемому передаточному числу и передаваемой мощности.
Муфты. Муфта – элемент машины, предназначенный для соединения валов и передачи крутящего момента. В лебедках могут использоваться практически все типы выпускаемых муфт. Однако наибольшее применение находят: для соединения быстроходных валов втулочно-пальцевые муфты, для соединения тихоходных валов – зубчатые.
Типоразмер муфты подбирается по справочнику в зависимости от крутящего момента на валах.
Тормоза. Устройства грузоподъемных машин, предназначенные для замедления скорости вращения ведущих валов и удержания груза в подвешенном состоянии.
По конструкции делятся на ленточные, колодочные и дисковые. По принципу действия на нормальнозамкнутые и нормальноразомкнутые. По типу привода - на тормоза с механическим, электромагнитным и электрогидравлическим приводом.
В лебедках наибольшее применение получили тормоза колодочные, нормальнозамкнутые с электромагнитным или электрогидравлическим приводом.
Типоразмер тормоза выбирается по каталогам в зависимости от расчетного тормозного момента на валу, на котором устанавливается этот тормоз.
Кроме того, обязательным элементом почти всех грузоподъемных механизмов является полиспаст.
Полиспаст – система подвижных и неподвижных блоков соединенных канатом и предназначенные для выигрыша в силе или скорости. В грузоподъемных механизмах в основном применяются полиспасты для выигрыша в силе.
Основной характеристикой полиспаста является кратность, которая показывает, во сколько раз данный полиспаст позволяет выиграть в силе или скорости. Однако при выигрыше в силе, мы проигрываем в скорости наматывания каната на барабан по сравнению со скоростью подъема груза, и в расстоянии перемещения груза по сравнению с длиной каната, наматываемого на барабан.
| <== предыдущая лекция | | | следующая лекция ==> |
| ТЕМА 7. УПРАВЛІННЯ ОБОРОТНИМИ АКТИВАМИ | | | Кошти, розрахунки та інші активи. |