Головна сторінка Випадкова сторінка
КАТЕГОРІЇ:
АвтомобіліБіологіяБудівництвоВідпочинок і туризмГеографіяДім і садЕкологіяЕкономікаЕлектронікаІноземні мовиІнформатикаІншеІсторіяКультураЛітератураМатематикаМедицинаМеталлургіяМеханікаОсвітаОхорона праціПедагогікаПолітикаПравоПсихологіяРелігіяСоціологіяСпортФізикаФілософіяФінансиХімія
ІІІ рівень
Дата добавления: 2015-08-29; просмотров: 444
|
|
Главные приводы в основном работают по блочной системе при подчиненном контуре регулирования тока. Преимущество систем, построенных по принципу подчиненного регулирования, заключается в возможности оптимизации характера переходных процессов. Применение унифицированной блочной системы регуляторов упрощает расчет, построение системы регулирования частот вращения главных приводов и сопряжение регуляторов с другими системами автоматического управления и регулирования технологических параметров.
Широкое применение получил автоматический контроль режимов работы главных приводов с помощью бесконтактных логических схем, осуществляющих необходимые блокировки заданных режимов работы приводов и выдающих командные сигналы для отработки этих режимов. Логические схемы обеспечивают также срабатывание различных защит электродвигателей главных приводов и тиристорных преобразователей.
Частоты вращения электродвигателей главных приводов в процессе прокатки связаны друг с другом определенным соотношением, зависящим от технологических условий прокатки. При изменении скорости возникает требование сохранения соотношения скоростей всех последующих клетей, что обеспечивается системой регулирования согласованной работы, управляющей задатчиками скорости клетей. Регулятор согласованной работы действует при ручной команде. При этом автоматический регулятор сам следит за логичностью подаваемой команды.
Аналоговые системы автоматического регулирования частоты вращения электродвигателей главных приводов обеспечивают статическую точность регулирования порядка 0,1% от максимальной скорости. При повышении скоростей прокатки указанная точность может оказаться недостаточной.
В цифровых системах регулирования скорости прокатных электродвигателей высокая статическая точность регулирования обеспечивается тем, что точность амплитуды дискретного сигнала не оказывает влияния на точность работы системы. В цифровых системах также облегчается применение интегрального регулирования путем подсчета числа импульсов сигналов ошибки.
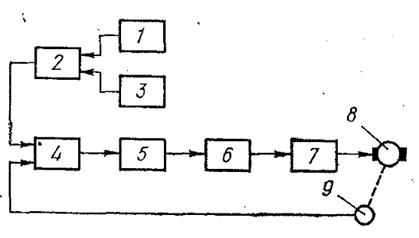
Рис. 1. Блок-схема цифровой системы регулирования скорости двигателей главных приводов:
1 — задающий генератор постоянной частоты; 2 — калибрующий умножитель частоты; 3 — задающее устройство оператора; 4 — орган сравнения; 5 — преобразователь; 6 — аналоговый регулятор; 7 — преобразователь; 8 — двигатель; 9 — частотный датчик
На рис. 1 приведена блок-схема системы цифрового регулирования частоты вращения главного привода. Частота вращения электродвигателя 8 преобразуется частотным датчиком 9 в последовательность импульсов с частотой, пропорциональной частоте вращения двигателя. Эти импульсы поступают на вход реверсивного счетчика (органа сравнения) 4. На другой вход счетчика поступает задающий сигнал также в виде импульсов, частота которых пропорциональна заданной частоте вращения электродвигателя. На выходе счетчика сигнал ошибки, пропорциональный интегралу разности заданной и действительной частот вращения
электродвигателя, преобразуется в аналоговую форму преобразователем 5 и поступает в аналоговый регулятор 6, который воздействует на преобразователь 7, питающий электродвигатель. Схема, состоящая из задающего кварцевого генератора постоянной частоты 1, калибрующего умножителя частоты 2 и задающего устройства оператора 3, вырабатывает сигнал задания, частота которого имеет высокую стабильность.
Сигнал ошибки в каждом установившемся режиме работы имеет постоянную величину. Изменение этого сигнала происходит в переходных процессах, качество которых зависит от коэффициента усиления и стабильности всей замкнутой системы автоматического регулирования.
Задание скорости может производиться с очень малыми интервалами с помощью задатчиков скорости для калибрующего умножителя, выполненных в виде переключателей.
Система регулирования скорости в чистовых клетях связана с регулированием величины петли в межклетевых промежутках. При этом основная задача системы заключается в поддержании заданной величины петли металла путем воздействия на скорость клетей.
Управление главными приводами клетей может успешно осуществляться от УВМ, применение которой) обеспечивает быстрое регулирование скорости главных приводов, поддержание скоростного режима с высокой точностью и т. п.
| <== предыдущая лекция | | | следующая лекция ==> |
| ІІ рівень | | | Стиль еклектика в інтер’єрі |