Головна сторінка Випадкова сторінка
КАТЕГОРІЇ:
АвтомобіліБіологіяБудівництвоВідпочинок і туризмГеографіяДім і садЕкологіяЕкономікаЕлектронікаІноземні мовиІнформатикаІншеІсторіяКультураЛітератураМатематикаМедицинаМеталлургіяМеханікаОсвітаОхорона праціПедагогікаПолітикаПравоПсихологіяРелігіяСоціологіяСпортФізикаФілософіяФінансиХімія
Розділ 1. Основи освітньої політики
Дата добавления: 2015-08-29; просмотров: 658
|
|
Передаточной функцией называется отношение лапласова изображения выходной величины к лапласовому изображению входной величины при нулевых начальных условиях.

Из уравнения передаточной функции следует, что изображение выходной величины имеет вид
Y(s)=W(s)X(s)
Учитывая торжественность оператора дифференцтрования р и комплексного переменного s в преобразовании Лапласа, формальное получение передаточной функции по дифференциальному уравнению заключается в замене оператора дифференцирования р комплексным переменным s и функцией времени x(t), y(t) их изображениями X(s), Y(s).
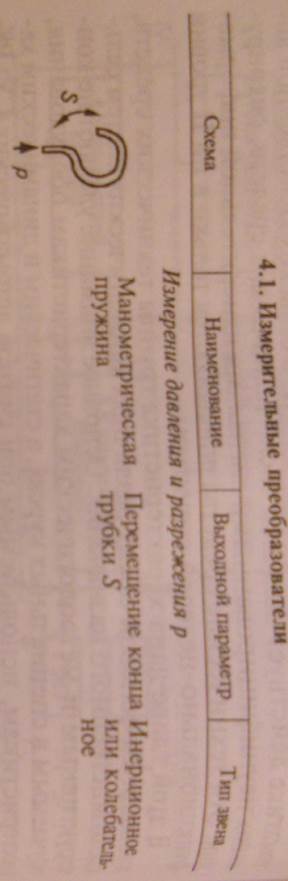
11. Функциональные устройства автоматики: измерительные преобразователи.
Измерительные преобразователи (ИП)-устройство предназначенное для выработки информации измерительной в форме удобной передачи, обработки, хранения, преобразования и хранения сигнала, но не воспринимаемая человеком-оператором.
По характеру выполняемой функции ИП делится на 2 группы:1)первичные(ПИП),2)вторичные(ВИП).
По характеру изменения выходного сигнала ИП:
- рылейные
- сигнальные
-импульсные
-цифровые
По физической природе выходного сигнала ИП:
-Электрические
-Гидравлические
-пневматические
В основе любой системы автоматического контроля, регулирования и управления лежит информация о состоянии и ходе технологических процессов, протекающих в объектах, о состоянии рабочих в-в и функционирования оборудования. Эту информацию в виде значений отдельных физических величин получают с помощью соответствующих технических устройств, которые в автоматике имеют общее название- измерительные преобразователи(ИП).
В отличие от измерительных приборов, где информация представляется в виде, удобном для непосредственного восприятия оператором- человеком, информация в ИП представляется в виде определенной физической величины, удобной для передачи и дальнейшего преобразования в сис-ме автоматики. Эта величина называется называется сигналом, и она однозначенно связана с контролируемой физической величиной или параметром процесса.


12. Функциональные устройства автоматики: регулирующие устройства и исполнительные механизмы.
Исполнительный механизм (ИМ) называется устройтсво автоматики, воздействующее непосредственно и через согласующие элементы на регулирующий орган управляемого объекта. ИМ как часть системы автоматического регулирования предназначен для обработки управляющего сигнала, формируемого управляющими элементами автоматики таким образом, чтобы отклонения регулируемой величины от заданного значения становилось как можно меньше.
К ИМ предъявляют ряд требований, а именно:
1. способность развивать необходимое перестановочное усилие или момент, достаточные для перестановки регулирующего органа объекта;
2. обеспечивать перестановку регулирующего органа на требуемую величину;
3. обеспечивать требуемую скорость и ускорение перемещение регулирующего органа;
4. иметь высокие технико-экономические показатели (надежность, стоимость и др.).
ИМ классифицируют по основным признакам: виду энергии, характеру движения выходного органа, виду используемого двигателя и др.
В зависимости от вида энергии, используемой для питания двигателя ИМ делят на электрические, пневматические и гидравлические. По виду движения выходного органа ИМ подразделяются на поворотные и прямоходовые. Поворотные ИМ бывают однобортные и много бортные. В зависимости от типа двигателя ИМ делятся на электродвигательные, электромагнитные, поршневые и мембранные. В зависимости от скорости движения выходного органа различают ИМ с постоянной скоростью и ИМ, у которых скорость перемещения выходного органа пропорциональна выходному сигналу.




Регулирующим устройством называют устройство которое изменяет состояние объекта путем изменения потока в-ва и энергии. Для регулирования потока твердого в-ва:
-непрерывного действия
-циклические
Для жидких в-в:вязкие, жидкие и полужидкие.
-для вязких(тесто)-шнековые,скребковые питатели.
-для полужидких-насосные установки
-для жидких-клапаны,задвижки,кран.
Газообразные в-ва регулируются при помощи вакуумных насосов, компресорных и вентиляционных установок, газовых клапанах и заслонок.
Бывают активные и пассивные:
Активные-самостоятельно могут регулировать и перемещать вентель,компрессоры.
Пассивный –кран,без электродвигателя.
,
13. Типовые соединения функциональных устройств автоматики: последовательное, параллельное и встречно-паралельное.
Существует три вида соединения звеньев в системе: а) последовательное б) параллельное в) встречно- параллельное соединение звеньев системы (соединение с обратной связью).
Последовательнымназывается такое соединением звеньев, при котором начало (вход) последующего элемента системы является концом (выходом) предыдущего элемента системы.

Используя свойство передаточной функции можно записать:

Передаточная функция последовательно соединенных звеньев равна произведению передаточных функций отдельных звеньев составляющих это последовательное соединение:
 ()
()
Параллельнымназывается такое соединение, у которого на вход поступает один и тот же сигнал, а выходные сигналы звеньев суммируются.

Используя следствие из определения передаточной функции можно записать:
 ()
()
Тогда передаточная функция для данного соединения может быть определена как:
 ()
()
Таким образом, передаточная функция параллельно соединенных звеньев равна алгебраической сумме передаточных функций отдельных звеньев.
| <== предыдущая лекция | | | следующая лекция ==> |
| Передмова | | | Пріоритети освітньої політики |