Головна сторінка Випадкова сторінка
КАТЕГОРІЇ:
АвтомобіліБіологіяБудівництвоВідпочинок і туризмГеографіяДім і садЕкологіяЕкономікаЕлектронікаІноземні мовиІнформатикаІншеІсторіяКультураЛітератураМатематикаМедицинаМеталлургіяМеханікаОсвітаОхорона праціПедагогікаПолітикаПравоПсихологіяРелігіяСоціологіяСпортФізикаФілософіяФінансиХімія
Дистрибутивний аналіз
Дата добавления: 2015-10-19; просмотров: 680
|
|
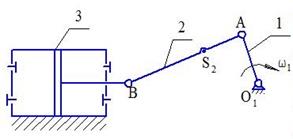
Рисунок 1- Задание №1
Для механизма компрессора даны:
H = 360 мм – ход поршня;
Vср = 4,8 м/с – средняя скорость поршня;
 – положение центра масс;
– положение центра масс;
λ = 0,25 – отношение длинны кривошипа к длине шатуна.
Первоочередной задачей проектирования кривошипно-ползунного механизма является его синтез, т. е. определение размеров звеньев по некоторым первоначально заданным параметрам:


Масштаб длины 
Длина звена AB на чертеже:
Структурный анализ механизма
Степень подвижности механизма определяем по формуле Чебышева для плоских механизмов:
W = 3∙n– 2∙p5– p4, где
n= 3 – число подвижных звеньев механизма;
p5= 4 – число низших кинематических пар;
p4= 0 – число высших кинематических пар.
Тогда:

Формула строения механизма имеет вид:

По классификации Ассура - Артоболевского данный механизм является механизмом 2-го класса. Разложение механизма на группы Ассура и входное звено показано на рис.1
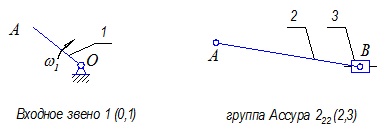
Рисунок 2 – Кинематическая схема механизма
Планы скоростей
Кинематическое исследование механизма начинаем с механизма 1-го класса. Для входного звена определяем угловую скорость  и линейную скорость
и линейную скорость  точки A:
точки A:

 Вектор скорости перпендикулярен звену OA и направлен в сторону вращения входного звена.
Вектор скорости перпендикулярен звену OA и направлен в сторону вращения входного звена.
Масштаб плана скоростей 
Скорость точки B определяют из векторного уравнения:



Скорость центра масс звена 2 и находим по теореме подобия.
 ( Большими буквами обозначаются реальные длины отрезков, малыми длины на чертеже)
( Большими буквами обозначаются реальные длины отрезков, малыми длины на чертеже)
Значения линейных и угловых скоростей точек и звеньев определяем через отрезки плана скоростей:

Вычисления:
| Положение 7 | Положение 6 |

|  ; ;
|

|  ; ;
|
 ; ;
|  ; ;
|
 ; ;
|  . .
|
Планы ускорений
Определяем ускорение точки A. Так как  , то
, то

Вектор нормального ускорения звена направлен вдоль звена OA от точки A к точке O ( к центру относительного вращения звена ).
Масштаб плана ускорений  ;
;
Ускорение точки B:
 ;
;



Величины нормальных ускорений:
Вычисления:
положение 7 положение 6

Ускорения  центра масс звена 2 находим по теореме подобия.
центра масс звена 2 находим по теореме подобия.
Значения полных, относительных и угловых ускорений точек и звеньев определяем через отрезки плана ускорений

Направления угловых ускорений определяем тем же методом, что и угловые скорости (через вектор касательного ускорения относительного движения точек B и D).
Вычисления:
| <== предыдущая лекция | | | следующая лекция ==> |
| Лінгвістичні міфи та омани. | | | Трансформаційний аналіз |