Классификация электромеханических приборов
По виду измеряемой величины
Амперметры, вольметры, омметры, частотометры, фазометры…
По роду электрического сигнала
Постоянного (=) или переменного (~) тока.
По способу создания противодействующего момента M пр
1. Механические.
2. Логометры.
По способу успокоения
1. Воздушные.
2. Жидкостные.
3. Магнитоиндукционные.
По типу измерительного механизма
1. Магнитоэлектронные.
2. Электромагнитные.
3. Электродинамические.
4. Электростатические.
5. Индукционные.
6. Ферродинамические.
|
Электромагнитные реле постоянного тока
|
Электромагнитные реле являются наиболее распространенными из группы электромеханических реле и получили широкое применение в устройствах автоматики, телемеханики и вычислительной техники. Если электромагнитные реле используются для переключения мощных цепей тока, они называются контакторами. Реле постоянного тока подразделяются на нейтральные и поляризованные. Нейтральное реле одинаково реагирует на постоянный ток обоих направлений, протекающий по его обмотке, т.е. положение якоря не зависит от направления тока в обмотке реле. Поляризованные реле реагируют на полярность сигнала.
По характеру движения якоря электромагнитные нейтральные реле подразделяются на два типа: с угловым движением якоря и втяжным якорем.
На рис. 11.2 показаны схемы электромагнитных реле клапанного типа и с втягиваемым внутрь катушки якорем. Для уменьшения магнитного сопротивления рабочего воздушного зазора сердечник электромагнитного реле обычно снабжается полюсным наконечником.
 При отсутствии управляющего сигнала якорь удален от сердечника на максимальное расстояние за счет возвратной пружины (см. рис. 11.2, а). В этом случае одна пара контактов замкнута (размыкающие контакты - РК), а другая пара разомкнута (замыкающие контакты - ЗК).
Принцип действия таких реле заключен в следующем: при подаче тока в обмотку (катушку) создается магнитный поток, который, проходя через сердечник, ярмо, якорь и воздушный зазор δн(0), создает магнитное усилие, притягивающее якорь к сердечнику. При этом якорь, воздействуя на колодку, перемещает ее таким образом, что контакты ЗК замыкаются, а РК размыкаются. В некоторых конструкциях реле якорь при выключении тока под действием собственного веса возвращается в исходное положение (см. рис. 11.2, в).
Рассмотрим особенности работы реле по этапам (рис. 11.3) на примере реле с угловым перемещением якоря (см. рис. 11.2, б). За счет индуктивности катушки реле ток в ней нарастает (убывает) не мгновенно, а постепенно. При детальном рассмотрении работы реле в процессе срабатывания и отпускания можно определить четыре этапа.
При отсутствии управляющего сигнала якорь удален от сердечника на максимальное расстояние за счет возвратной пружины (см. рис. 11.2, а). В этом случае одна пара контактов замкнута (размыкающие контакты - РК), а другая пара разомкнута (замыкающие контакты - ЗК).
Принцип действия таких реле заключен в следующем: при подаче тока в обмотку (катушку) создается магнитный поток, который, проходя через сердечник, ярмо, якорь и воздушный зазор δн(0), создает магнитное усилие, притягивающее якорь к сердечнику. При этом якорь, воздействуя на колодку, перемещает ее таким образом, что контакты ЗК замыкаются, а РК размыкаются. В некоторых конструкциях реле якорь при выключении тока под действием собственного веса возвращается в исходное положение (см. рис. 11.2, в).
Рассмотрим особенности работы реле по этапам (рис. 11.3) на примере реле с угловым перемещением якоря (см. рис. 11.2, б). За счет индуктивности катушки реле ток в ней нарастает (убывает) не мгновенно, а постепенно. При детальном рассмотрении работы реле в процессе срабатывания и отпускания можно определить четыре этапа.
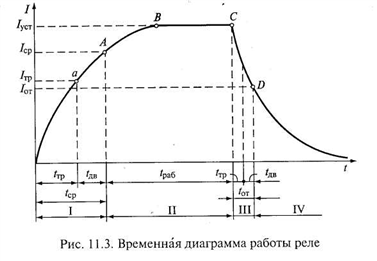 Этап I - срабатывание реле. Длительность этого этапа - время полного срабатывания tcp, т.е. промежуток времени от момента подачи напряжения на катушку реле до момента надежного замыкания контактов (точка А); I тр - ток трогания, при котором начинается движение якоря; t тр - время, за которое ток достигает значения I тр, (точка а), т.е. промежуток, соответствующий началу движения якоря; I ср - ток, при котором срабатывает реле; t дв - время движения якоря при срабатывании. Таким образом, время полного срабатывания, отвечающее окончанию движения якоря, tcp = t тр + t дв.
Этап II - работа реле (t раб - время работы реле). После того как реле сработает, ток в обмотке продолжает увеличиваться (участок АВ), пока не достигнет установившегося значения. Участок АВ необходим для того, чтобы обеспечить надежное притяжение якоря к сердечнику, исключающее вибрацию якоря при сотрясениях реле. Впоследствии ток в обмотке реле остается неизменным. Отношение установившегося тока I уст к току срабатывания I ср называется коэффициентом запаса реле по срабатыванию K зап, т. е. K зап показывает надежность работы реле: K зап = I уст/ I ср = = 1,5...2. Величина I уст не должна превышать значения, допустимого для обмотки реле по условиям ее нагрева.
Этап III - отпускание реле. Этот период начинается от момента прекращения подачи сигнала (точка С) и продолжается до момента, когда ток в обмотке реле уменьшится до значения I от (точка D - прекращение воздействия реле на управляемую цепь). При этом различают время трогания при отпускании t тр и время движения I дв.
Время отпускания t от = t тр + t дв, где t тр - время до начала движения якоря при отпускании; t дв - продолжительность перемещения якоря. Отношение тока отпускания к току срабатывания называется коэффициентом возврата: Kв = I от/ Iср < 1; обычно Kв = 0,4...0,8.
Этап IV - покой реле - отрезок времени от момента размыкания контактов реле (точка D) до момента поступления нового сигнала на его обмотку. При быстром следовании управляющих сигналов друг за другом работа реле характеризуется максимальной частотой срабатывания (числом срабатываний реле в единицу времени).
Этап I - срабатывание реле. Длительность этого этапа - время полного срабатывания tcp, т.е. промежуток времени от момента подачи напряжения на катушку реле до момента надежного замыкания контактов (точка А); I тр - ток трогания, при котором начинается движение якоря; t тр - время, за которое ток достигает значения I тр, (точка а), т.е. промежуток, соответствующий началу движения якоря; I ср - ток, при котором срабатывает реле; t дв - время движения якоря при срабатывании. Таким образом, время полного срабатывания, отвечающее окончанию движения якоря, tcp = t тр + t дв.
Этап II - работа реле (t раб - время работы реле). После того как реле сработает, ток в обмотке продолжает увеличиваться (участок АВ), пока не достигнет установившегося значения. Участок АВ необходим для того, чтобы обеспечить надежное притяжение якоря к сердечнику, исключающее вибрацию якоря при сотрясениях реле. Впоследствии ток в обмотке реле остается неизменным. Отношение установившегося тока I уст к току срабатывания I ср называется коэффициентом запаса реле по срабатыванию K зап, т. е. K зап показывает надежность работы реле: K зап = I уст/ I ср = = 1,5...2. Величина I уст не должна превышать значения, допустимого для обмотки реле по условиям ее нагрева.
Этап III - отпускание реле. Этот период начинается от момента прекращения подачи сигнала (точка С) и продолжается до момента, когда ток в обмотке реле уменьшится до значения I от (точка D - прекращение воздействия реле на управляемую цепь). При этом различают время трогания при отпускании t тр и время движения I дв.
Время отпускания t от = t тр + t дв, где t тр - время до начала движения якоря при отпускании; t дв - продолжительность перемещения якоря. Отношение тока отпускания к току срабатывания называется коэффициентом возврата: Kв = I от/ Iср < 1; обычно Kв = 0,4...0,8.
Этап IV - покой реле - отрезок времени от момента размыкания контактов реле (точка D) до момента поступления нового сигнала на его обмотку. При быстром следовании управляющих сигналов друг за другом работа реле характеризуется максимальной частотой срабатывания (числом срабатываний реле в единицу времени).
|
| | Электромагнитные реле
| | | | |
В системах автоматики и телемеханики одним из наиболее распространенных элементов является реле. Реле - это устройство, которое автоматически осуществляет скачкообразное изменение (переключение) выходного сигнала под воздействием управляющего сигнала, изменяющегося непрерывно в определенных пределах.
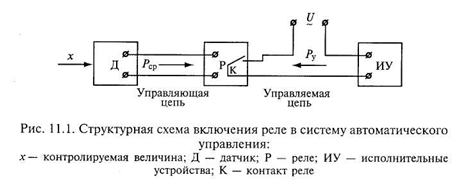
Электрическое реле является промежуточным элементом, который приводит в действие одну или несколько управляемых электрических цепей при воздействии на него определенных электрических сигналов управляющей цепи (рис. 11.1).
Основные параметры реле:
мощность срабатывания Рср - минимальная электрическая мощность, которая должна быть подведена к реле от управляющей цепи для его надежного срабатывания, т. е. приведения в действие управляемой цепи. Эта мощность определяется общими электрическими и конструктивными параметрами реле;
мощность управления Ру - максимальная электрическая мощность в управляемой цепи, при которой контакты реле еще работают надежно. Мощность управления определяется параметрами контактов реле, переключающих управляемую цепь.
 Выбор соответствующего типа реле производится на основании значений Рср и Ру, так как эти параметры постоянны для отдельных конструкций реле;
допустимая разрывная мощность Рр - мощность в цепи, разрываемой контактами при определенном токе или напряжении без образования устойчивой электрической дуги при данном напряжении;
коэффициент управления Kу - величина, характеризующая отношение управляемой мощности к мощности срабатывания реле: Kу= Ру/Рср ≥ 1;
время срабатывания tcp - интервал времени от момента поступления сигнала из управляющей цепи до момента начала воздействия реле на управляемую цепь. Допустимое значение tcp определяется необходимой быстротой передачи сигнала в управляемую цепь.
Существующие типы реле можно классифицировать по следующим основным признакам:
· назначению - управления, защиты и сигнализации;
· принципу действия - электромеханические (электромагнитные, нейтральные, электромагнитные поляризованные, магнитоэлектрические, электродинамические, индукционные, электротермические), магнитные бесконтактные, электронные, триггерные (бесконтактно-электронные), фотоэлектронные, ионные;
· измеряемой величине - электрические (тока, напряжения, мощности, сопротивления, частоты, коэффициента мощности), механические (силы, давления, скорости, перемещения, уровня, объема и др.), тепловые (температуры, количества теплоты), оптические, силы звука и других физических величин (времени, вязкости и др.);
· мощности управления - маломощные с мощностью управления Ру ≤ 1 Вт, средней мощности с Ру = 1... 10 Вт, мощные с Ру > 10 Вт;
· времени срабатывания - безынерционные (tср ≤ 0,001 с), быстродействующие (tcp = 0,001...0,050 с), замедленные (t ср = 0,15... 1,00 с), реле времени (tcp > 1 с).
Наиболее распространены электромеханические реле, в которых изменение входной электрической величины вызывает механическое перемещение подвижной части - якоря, приводящее к замыканию или размыканию контактов.
Выбор соответствующего типа реле производится на основании значений Рср и Ру, так как эти параметры постоянны для отдельных конструкций реле;
допустимая разрывная мощность Рр - мощность в цепи, разрываемой контактами при определенном токе или напряжении без образования устойчивой электрической дуги при данном напряжении;
коэффициент управления Kу - величина, характеризующая отношение управляемой мощности к мощности срабатывания реле: Kу= Ру/Рср ≥ 1;
время срабатывания tcp - интервал времени от момента поступления сигнала из управляющей цепи до момента начала воздействия реле на управляемую цепь. Допустимое значение tcp определяется необходимой быстротой передачи сигнала в управляемую цепь.
Существующие типы реле можно классифицировать по следующим основным признакам:
· назначению - управления, защиты и сигнализации;
· принципу действия - электромеханические (электромагнитные, нейтральные, электромагнитные поляризованные, магнитоэлектрические, электродинамические, индукционные, электротермические), магнитные бесконтактные, электронные, триггерные (бесконтактно-электронные), фотоэлектронные, ионные;
· измеряемой величине - электрические (тока, напряжения, мощности, сопротивления, частоты, коэффициента мощности), механические (силы, давления, скорости, перемещения, уровня, объема и др.), тепловые (температуры, количества теплоты), оптические, силы звука и других физических величин (времени, вязкости и др.);
· мощности управления - маломощные с мощностью управления Ру ≤ 1 Вт, средней мощности с Ру = 1... 10 Вт, мощные с Ру > 10 Вт;
· времени срабатывания - безынерционные (tср ≤ 0,001 с), быстродействующие (tcp = 0,001...0,050 с), замедленные (t ср = 0,15... 1,00 с), реле времени (tcp > 1 с).
Наиболее распространены электромеханические реле, в которых изменение входной электрической величины вызывает механическое перемещение подвижной части - якоря, приводящее к замыканию или размыканию контактов.
|
| | Поляризованные электромагнитные реле
| | | | |
В отличие от рассмотренных ранее нейтральных электромагнитных реле, у поляризованного реле направление электромагнитного усилия зависит от полярности сигнала постоянного тока в обмотке. Поляризация этих реле осуществляется при помощи постоянного магнита.
Существует много конструктивных разновидностей поляризованных реле, которые классифицируются по ряду признаков. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и мостовой магнитными цепями, по числу обмоток управления - одно и многообмоточные, по способу настройки контактов (числу устойчивых положений якоря) - двух- и трехпозиционные.
Поляризованные реле могут быть использованы также в качестве вибропреобразователей, но наибольшее распространение они получили в маломощной автоматике, особенно в следящих системах при управлении реверсивными двигателями.
К числу достоинств поляризованных реле относятся: высокая чувствительность, которая характеризуется малой мощностью срабатывания и составляет 10-5 Вт; большой коэффициент управления; малое время срабатывания (единицы миллисекунд).
Недостатки по сравнению с нейтральными электромагнитными реле следующие: несколько сложнее конструкция; большие габаритные размеры, вес и стоимость.
В поляризованных реле используют дифференциальные и мостовые схемы магнитных цепей, которые имеют много разновидностей (название цепей определяется типом электрической схемы замещения электромагнитной системы). На рис. 11.11 изображено поляризованное реле с дифференциальной схемой магнитной цепи.
 На якорь реле действует два независимых друг от друга потока: поток Ф0(п), создаваемый постоянным магнитом 3 и не зависящий от рабочего состояния схемы, в которую включено реле, и рабочий (управляющий) поток Фэ(р), создаваемый намагничивающими катушками 1 и 1’ и зависящий от тока, протекающего по их обмоткам.
Электромагнитное усилие, действующее на якорь 4, зависит, таким образом, от суммарного действия потоков Фэ(р) и Ф0(п). Изменение направления электромагнитного усилия при изменении полярности тока в рабочей обмотке происходит вследствие того, что изменяется направление рабочего потока относительно поляризующего.
Поляризующий поток Ф0(п) проходит по якорю и разветвляется на две части - Ф01 и Ф02 в соответствии с проводимостями воздушных зазоров слева δЛ и справа δпр от якоря. В зависимости от полярности управляющего сигнала рабочий поток Фэ(р) вычитается из потока Ф01 в зазоре слева от якоря и прибавляется к потоку Ф02 справа от якоря (как показано на рис. 11.11), или наоборот. В случае, показанном на рисунке, якорь перекинется из левого положения в правое. При выключении сигнала якорь будет находиться в том положении, которое он занимал до выключения сигнала. Таким образом, результирующее электромагнитное усилие, действующее на якорь, будет направлено в строну того зазора, где магнитные потоки суммируются.
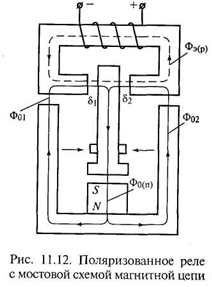
В поляризованном реле с мостовой схемой магнитной цепи (рис. 11.12) силы притяжения якоря, включенного в одну из диагоналей этой схемы, действуют так же, как и в дифференциальной схеме, т.е. в воздушном зазоре с одной стороны якоря рабочий поток Фэ(р) направлен согласно с поляризующим потоком Ф0(П), а с другой - встречно. Мостовые схемы поляризованных реле имеют более высокую стабильность параметров и устойчивость к внешним механическим воздействиям.
На якорь реле действует два независимых друг от друга потока: поток Ф0(п), создаваемый постоянным магнитом 3 и не зависящий от рабочего состояния схемы, в которую включено реле, и рабочий (управляющий) поток Фэ(р), создаваемый намагничивающими катушками 1 и 1’ и зависящий от тока, протекающего по их обмоткам.
Электромагнитное усилие, действующее на якорь 4, зависит, таким образом, от суммарного действия потоков Фэ(р) и Ф0(п). Изменение направления электромагнитного усилия при изменении полярности тока в рабочей обмотке происходит вследствие того, что изменяется направление рабочего потока относительно поляризующего.
Поляризующий поток Ф0(п) проходит по якорю и разветвляется на две части - Ф01 и Ф02 в соответствии с проводимостями воздушных зазоров слева δЛ и справа δпр от якоря. В зависимости от полярности управляющего сигнала рабочий поток Фэ(р) вычитается из потока Ф01 в зазоре слева от якоря и прибавляется к потоку Ф02 справа от якоря (как показано на рис. 11.11), или наоборот. В случае, показанном на рисунке, якорь перекинется из левого положения в правое. При выключении сигнала якорь будет находиться в том положении, которое он занимал до выключения сигнала. Таким образом, результирующее электромагнитное усилие, действующее на якорь, будет направлено в строну того зазора, где магнитные потоки суммируются.
В поляризованном реле с мостовой схемой магнитной цепи (рис. 11.12) силы притяжения якоря, включенного в одну из диагоналей этой схемы, действуют так же, как и в дифференциальной схеме, т.е. в воздушном зазоре с одной стороны якоря рабочий поток Фэ(р) направлен согласно с поляризующим потоком Ф0(П), а с другой - встречно. Мостовые схемы поляризованных реле имеют более высокую стабильность параметров и устойчивость к внешним механическим воздействиям.
 Поляризованные реле выпускаются трех видов настройки. Реле, изображенное на рис. 11.11, является двухпозиционным. Если неподвижные контакты 5 и 5' симметрично расположены относительно нейтральной линии (якорь отрегулирован симметрично), то при выключении управляющего сигнала якорь реле остается в том же положении, которое он занимал при наличии управляющего сигнала. Повторное включение управляющего сигнала прежней полярности не вызовет изменения положения якоря. Если изменить полярность управляющего сигнала, то якорь перебросится в другое положение и останется в нем после снятия сигнала. Такая настройка называется нейтральной или двухпозиционной.
Поляризованные реле выпускаются трех видов настройки. Реле, изображенное на рис. 11.11, является двухпозиционным. Если неподвижные контакты 5 и 5' симметрично расположены относительно нейтральной линии (якорь отрегулирован симметрично), то при выключении управляющего сигнала якорь реле остается в том же положении, которое он занимал при наличии управляющего сигнала. Повторное включение управляющего сигнала прежней полярности не вызовет изменения положения якоря. Если изменить полярность управляющего сигнала, то якорь перебросится в другое положение и останется в нем после снятия сигнала. Такая настройка называется нейтральной или двухпозиционной.
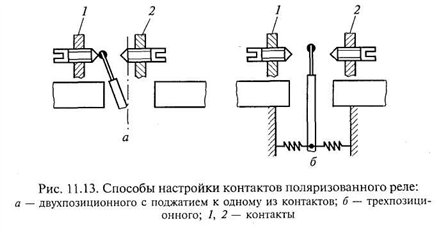 Если (рис. 11.13, а) один из контактов 1 или 2 выдвинут за нейтральную линию, то реле является двухпозиционным с преобладанием к одному из контактов. В этом случае при выключенном реле якорь всегда прижат к левому контакту 1 (к правому контакту 2, если за нейтральную линию выдвинут левый контакт) и перебрасывается вправо лишь на время протекания в управляющей обмотке тока соответствующей полярности.
Трехпозиционное реле имеет симметрично расположенные от нейтральной линии неподвижные контакты (рис. 11.13, б). Якорь при отсутствии управляющего сигнала удерживается в среднем положении с помощью специальных пружин, расположенных с двух сторон, или закрепляется на плоской пружине, упругость которой создает устойчивое положение равновесия в среднем положении. При подаче сигнала в управляющую обмотку контакт на якоре замыкается с левым или правым контактом (в зависимости от полярности сигнала) и возвращается в нейтральное положение после снятия сигнала.
Поляризованные реле находят широкое применение в схемах автоматики благодаря своим характерным особенностям. Наличие нескольких обмоток позволяет использовать их в качестве логических элементов, небольшая мощность срабатывания - в качестве элементов контроля небольших электрических сигналов, малое время срабатывания и чувствительность к полярности входных сигналов - в качестве амплитудных модуляторов и демодуляторов. Благодаря высокой чувствительности поляризованные реле часто используют в маломощных цепях переменного тока с включением через выпрямитель.
Если (рис. 11.13, а) один из контактов 1 или 2 выдвинут за нейтральную линию, то реле является двухпозиционным с преобладанием к одному из контактов. В этом случае при выключенном реле якорь всегда прижат к левому контакту 1 (к правому контакту 2, если за нейтральную линию выдвинут левый контакт) и перебрасывается вправо лишь на время протекания в управляющей обмотке тока соответствующей полярности.
Трехпозиционное реле имеет симметрично расположенные от нейтральной линии неподвижные контакты (рис. 11.13, б). Якорь при отсутствии управляющего сигнала удерживается в среднем положении с помощью специальных пружин, расположенных с двух сторон, или закрепляется на плоской пружине, упругость которой создает устойчивое положение равновесия в среднем положении. При подаче сигнала в управляющую обмотку контакт на якоре замыкается с левым или правым контактом (в зависимости от полярности сигнала) и возвращается в нейтральное положение после снятия сигнала.
Поляризованные реле находят широкое применение в схемах автоматики благодаря своим характерным особенностям. Наличие нескольких обмоток позволяет использовать их в качестве логических элементов, небольшая мощность срабатывания - в качестве элементов контроля небольших электрических сигналов, малое время срабатывания и чувствительность к полярности входных сигналов - в качестве амплитудных модуляторов и демодуляторов. Благодаря высокой чувствительности поляризованные реле часто используют в маломощных цепях переменного тока с включением через выпрямитель.
|
| | Контакты реле. Средства дуго- и искрогашения
| | | | |
Контакты, являясь важнейшим элементом реле, определяют надежность и срок их службы. По характеру работы контакты подразделяются на замыкающие (при отсутствии сигнала в обмотке реле они разомкнуты, а при наличии тока в управляющей обмотке они замыкаются) и размыкающие (при отсутствии сигнала они замкнуты и размыкаются при наличии сигнала в обмотке реле). В процессе работы реле контакты могут находиться в следующих состояниях: замкнутом, в процессе размыкания, разомкнутом и в процессе замыкания.
К тяжелым условиям работы контактов, при которых происходит наибольший износ, относятся их замкнутое состояние, когда через контакты течет весь ток нагрузки, и процесс размыкания, когда между контактами возникает дуга.
По мере увеличения усилия FK, действующего на контакты, увеличивается площадь их соприкосновения, а переходное сопротивление уменьшается. При наличии на поверхности контактов окисной пленки необходимо, чтобы механическое давление в точках контакта было достаточным для ее разрушения.
Зависимость переходного сопротивления от контактного давления следующая:
 где а - коэффициент, зависящий от свойств контактного материала и шероховатости контактной поверхности; Fk - контактное усилие; b - коэффициент, характеризующий форму контактов.
Контакты по форме контактирующих поверхностей и в зависимости от тока, на который они рассчитаны, делят на три основные группы (рис. 11.14):
· точечные - конус и плоскость или полусфера и плоскость (теоретически с соприкосновением в одной точке), рассчитаны на небольшие токи;
· плоскостные - плоскость и плоскость, рассчитаны на средние токи;
· линейные - с соприкосновением по линии, рассчитаны на большие токи.
В реле малой и средней мощностей наибольшее распространение имеет точечный контакт, как обеспечивающий надежное электрическое соединение при небольшом контактном давлении. Контакты при этом закрепляются на упругих плоских пружинах. Существуют контакты специальных типов: вакуумные и ртутные.
где а - коэффициент, зависящий от свойств контактного материала и шероховатости контактной поверхности; Fk - контактное усилие; b - коэффициент, характеризующий форму контактов.
Контакты по форме контактирующих поверхностей и в зависимости от тока, на который они рассчитаны, делят на три основные группы (рис. 11.14):
· точечные - конус и плоскость или полусфера и плоскость (теоретически с соприкосновением в одной точке), рассчитаны на небольшие токи;
· плоскостные - плоскость и плоскость, рассчитаны на средние токи;
· линейные - с соприкосновением по линии, рассчитаны на большие токи.
В реле малой и средней мощностей наибольшее распространение имеет точечный контакт, как обеспечивающий надежное электрическое соединение при небольшом контактном давлении. Контакты при этом закрепляются на упругих плоских пружинах. Существуют контакты специальных типов: вакуумные и ртутные.
 К материалам, из которых изготовляются контакты, предъявляются особые требования: они должны быть механически прочными, твердыми, иметь высокие значения температуры плавления, обладать хорошей тепло- и электропроводностью, легко обрабатываться, быть устойчивыми против коррозии и эрозии, а также дешевыми.
На практике при выборе материала контактов пользуются следующими соображениями:
· малые давления - 0,01... 0,03 Н (высокочувствительные реле) - платина;
· давления от 0,05 до 1 Н (при малой частоте срабатывания) - серебро;
· давления от 0,3 до 1 Н (при большей частоте срабатывания) - металлокерамические материалы;
· давление свыше 1 Н (большая частота срабатывания) - вольфрам.
Основной причиной разрушения контактов, определяющей срок их службы, является дуговой разряд, возникающий при их размыкании. Причиной интенсивного разряда является наличие в управляемой цепи реактивного сопротивления. Если оно имеет емкостный характер, то интенсивное искрение наблюдается при замыкании контактов. Если же управляемая цепь содержит значительную индуктивность, то особенно сильный и затяжной разряд возникает при разрыве этой цепи из-за образующегося перенапряжения на контактах. В большинстве случаев управляемая цепь содержит индуктивность.
Применяются два основных метода искро- и дугогашения: шунтирование индуктивности разрываемой цепи и шунтирование контактов. В обоих случаях, пока контакты замкнуты, в магнитном поле индуктивности накапливается энергия, которая при размыкании контактов расходуется не в дуге, а в шунтирующем устройстве. Методы искрогашения сводятся к созданию замедленного исчезновения тока.
На рис. 11.15 изображены основные схемы искрогашения. В схеме, представленной рис. 11.15, а,применяется метод шунтирования индуктивной нагрузки последовательным включением емкости с сопротивлением Rm. В момент размыкания контактов в контуре, образованном нагрузкой и шунтом, под действием энергии, запасенной в магнитном поле, возникает ток переходного процесса, который протекает еще некоторое время после размыкания контактов, предотвращая тем самым наведение высоких значений ЭДС самоиндукции.
К материалам, из которых изготовляются контакты, предъявляются особые требования: они должны быть механически прочными, твердыми, иметь высокие значения температуры плавления, обладать хорошей тепло- и электропроводностью, легко обрабатываться, быть устойчивыми против коррозии и эрозии, а также дешевыми.
На практике при выборе материала контактов пользуются следующими соображениями:
· малые давления - 0,01... 0,03 Н (высокочувствительные реле) - платина;
· давления от 0,05 до 1 Н (при малой частоте срабатывания) - серебро;
· давления от 0,3 до 1 Н (при большей частоте срабатывания) - металлокерамические материалы;
· давление свыше 1 Н (большая частота срабатывания) - вольфрам.
Основной причиной разрушения контактов, определяющей срок их службы, является дуговой разряд, возникающий при их размыкании. Причиной интенсивного разряда является наличие в управляемой цепи реактивного сопротивления. Если оно имеет емкостный характер, то интенсивное искрение наблюдается при замыкании контактов. Если же управляемая цепь содержит значительную индуктивность, то особенно сильный и затяжной разряд возникает при разрыве этой цепи из-за образующегося перенапряжения на контактах. В большинстве случаев управляемая цепь содержит индуктивность.
Применяются два основных метода искро- и дугогашения: шунтирование индуктивности разрываемой цепи и шунтирование контактов. В обоих случаях, пока контакты замкнуты, в магнитном поле индуктивности накапливается энергия, которая при размыкании контактов расходуется не в дуге, а в шунтирующем устройстве. Методы искрогашения сводятся к созданию замедленного исчезновения тока.
На рис. 11.15 изображены основные схемы искрогашения. В схеме, представленной рис. 11.15, а,применяется метод шунтирования индуктивной нагрузки последовательным включением емкости с сопротивлением Rm. В момент размыкания контактов в контуре, образованном нагрузкой и шунтом, под действием энергии, запасенной в магнитном поле, возникает ток переходного процесса, который протекает еще некоторое время после размыкания контактов, предотвращая тем самым наведение высоких значений ЭДС самоиндукции.
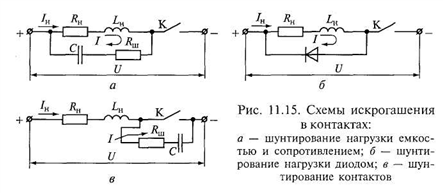 Энергия магнитного поля переходит в теплоту, которая выделяется на сопротивлении шунта Rm. Наличие конденсатора в схеме исключает прохождение тока нагрузки при замкнутых контактах, и, следовательно, исключаются потери энергии в сопротивлении шунта.
Для того чтобы в контуре LH - RH - С - R ш не возникли автоколебания тока, емкость выбирают из условия RH + Rm >; 2 √LH/C.
В схеме на рис. 1.15, б диод производит аналогичное действие, т. е. шунтирует индуктивную нагрузку и пропускает ток переходного процесса I, который создает ЭДС самоиндукции в момент разрыва управляемой цепи. При замкнутых контактах диод заперт напряжением сети и не пропускает ток нагрузки.
На рис. 11.15, в изображена схема шунтирования контактов емкостью с сопротивлением. Здесь емкость исключает протекание тока нагрузки в шунтирующей цепи при разомкнутых контактах. Кроме того, устраняется расход энергии как в цепи нагрузки, так и в шунтирующем сопротивлении, поскольку конденсатор не пропускает постоянный ток.
Цепочка Rш - С создает путь мимо контактов для убывающего после их разрыва тока нагрузки и для рассеяния энергии, запасенной в магнитном поле цепи нагрузки. После размыкания контактов ток по мере заряда конденсатора от нуля до напряжения питания U постепенно уменьшается до нуля (т.е. резкого увеличения напряжения на контактах не возникает). Напряжение на контактах, как и на емкости, постепенно увеличивается до значения U. Ток в этом случае проходит мимо контактов через цепочку Rш - С и дуговой разряд не возникает. Так как на практике емкость конденсатора выбирают в пределах 0,5... 2 мкФ, то зарядка конденсатора будет происходить медленно и, следовательно, напряжение на контактах будет также нарастать достаточно медленно.
Энергия магнитного поля переходит в теплоту, которая выделяется на сопротивлении шунта Rm. Наличие конденсатора в схеме исключает прохождение тока нагрузки при замкнутых контактах, и, следовательно, исключаются потери энергии в сопротивлении шунта.
Для того чтобы в контуре LH - RH - С - R ш не возникли автоколебания тока, емкость выбирают из условия RH + Rm >; 2 √LH/C.
В схеме на рис. 1.15, б диод производит аналогичное действие, т. е. шунтирует индуктивную нагрузку и пропускает ток переходного процесса I, который создает ЭДС самоиндукции в момент разрыва управляемой цепи. При замкнутых контактах диод заперт напряжением сети и не пропускает ток нагрузки.
На рис. 11.15, в изображена схема шунтирования контактов емкостью с сопротивлением. Здесь емкость исключает протекание тока нагрузки в шунтирующей цепи при разомкнутых контактах. Кроме того, устраняется расход энергии как в цепи нагрузки, так и в шунтирующем сопротивлении, поскольку конденсатор не пропускает постоянный ток.
Цепочка Rш - С создает путь мимо контактов для убывающего после их разрыва тока нагрузки и для рассеяния энергии, запасенной в магнитном поле цепи нагрузки. После размыкания контактов ток по мере заряда конденсатора от нуля до напряжения питания U постепенно уменьшается до нуля (т.е. резкого увеличения напряжения на контактах не возникает). Напряжение на контактах, как и на емкости, постепенно увеличивается до значения U. Ток в этом случае проходит мимо контактов через цепочку Rш - С и дуговой разряд не возникает. Так как на практике емкость конденсатора выбирают в пределах 0,5... 2 мкФ, то зарядка конденсатора будет происходить медленно и, следовательно, напряжение на контактах будет также нарастать достаточно медленно.
|

Практические расчеты на срез и смятие При изучении темы обратите внимание на основные расчетные предпосылки и условности расчета...
|

Функция спроса населения на данный товар Функция спроса населения на данный товар: Qd=7-Р. Функция предложения: Qs= -5+2Р,где...
|

Аальтернативная стоимость. Кривая производственных возможностей В экономике Буридании есть 100 ед. труда с производительностью 4 м ткани или 2 кг мяса...
|

Вычисление основной дактилоскопической формулы Вычислением основной дактоформулы обычно занимается следователь. Для этого все десять пальцев разбиваются на пять пар...
|
САНИТАРНО-МИКРОБИОЛОГИЧЕСКОЕ ИССЛЕДОВАНИЕ ВОДЫ, ВОЗДУХА И ПОЧВЫ Цель занятия.Ознакомить студентов с основными методами и показателями...
Меры безопасности при обращении с оружием и боеприпасами 64. Получение (сдача) оружия и боеприпасов для проведения стрельб осуществляется в установленном порядке[1].
65. Безопасность при проведении стрельб обеспечивается...
Весы настольные циферблатные Весы настольные циферблатные РН-10Ц13 (рис.3.1) выпускаются с наибольшими пределами взвешивания 2...
|
Эффективность управления. Общие понятия о сущности и критериях эффективности. Эффективность управления – это экономическая категория, отражающая вклад управленческой деятельности в конечный результат работы организации...
Мотивационная сфера личности, ее структура. Потребности и мотивы. Потребности и мотивы, их роль в организации деятельности...
Классификация ИС по признаку структурированности задач Так как основное назначение ИС – автоматизировать информационные процессы для решения определенных задач, то одна из основных классификаций – это классификация ИС по степени структурированности задач...
|
|
