БІЛЕТ № 26
№1 В функцiональному та структурному вiдношеннi операцiйний пристрiй подiляється на двi частини: операцiйний та керуючий автомати. Операцiйний автомат ОА служить для збереження слiв iнформацiї, виконання набору мiкрооперацiй i обчислення значень логiчних умов, тобто операцiйний автомат є структурою, органiзованою для виконання дiй над iнформацiєю. Мiкрооперацiї, що реалiзуються операцiйним автоматом, iнiцiюються множиною керуючих сигналiв Y=[y(1),..., y(m)], з кожним iз них ототожнюється визначена мiкрооперацiя. Значення логiчних умов, якi обчислюються в операцiйному автоматi, вiдображаються множиною освiдомлюючих сигналiв X=[x(1),..., x(l)], кожний з яких ототожнюється з визначеною логiчною умовою. Керуючий автомат КА генерує послiдовнiсть керуючих сигналiв, визначену мiкропрограмою, яка вiдповiдає значенням логiчних умов. Іншими словами, керуючий автомат задає порядок виконання дiй в операцiйному автоматi, що зрозумiло з алгоритму виконання операцiй. Найменування операцiї, яку необхiдно виконати в пристрої, визначається кодом g операцiї. По вiдношенню до керуючого автомату сигнали g(1),..., g(h), за допомогою яких кодується найменування операцiї, i освiдомлюючi сигнали x(1),..., x(l), що формуються в операцiйному автоматi, грають однакову роль: вони впливають на порядок утворення робочих сигналiвY. Тому сигнали g(1),..., g(h) i x(1),..., x(l) вiдносяться до одного класу - класу освiдомлюючих сигналiв, що iдуть на вхiд управляючого автомату. Таким чином, будь-який операцiйний пристрiй - процессор, канал вводу-виводу, пристрiй управлiння зовнiшнiм пристроєм - є композицiєю операцiйного та керуючого автоматiв. Операцiйний автомат, реалiзовуючи дiї над словами iнформацiї, є виконавчою частиною пристрою, роботою якого управляє керуючий автомат, генеруючий необхiднi послiдовностi управляючих сигналiв. На даному етапi розгляду питання операцiйний та керуючий автомати можуть бути визначенi своїми функцiями - списком дiй, що ним виконується, виходячи iз яких в подальшому буде визначена структура автоматiв. Функцiя операцiйного автомату визначається слiдуючою єднiстю вiдомостей: Множиною вхiдних слiв d={d(1),..., d(H)}, що вводиться в автомат в якостi операндiв. Множиною вихiдних слiв R={r(1),..., r(Q)}, що представляє результати операцiй. Множиною мiкрооперацiй Y={y(m)}, m=1,..., M, реалiзуючих перетворення S={f(m)}(S) над словами iнформацiї, де f(m) - шукана функцiя. Таким чином, функцiя операцiйного автомату задана, якщо визначенi множини D, R, S, Y, X. Час не є аргументом функцiї операцiйного автомату. Функцiя встановлює список дiй - мiкрооперацiй i логiчних умов, - якi може виконувати автомат, але нiяк не визначає порядок слiдування цих дiй у часi. Iнакше кажучи, функцiя операцiйного автомату характеризує засоби, якi можуть бути використанi для обчислень, але не сам обчислювальний процес. Порядок виконання дiй у часi визначається у формi функцiй управляючого автомату. 1.2.2 Структурна схема операційного автомату В загальному випадку операційний пристрій будується по схемі. Операційний автомат ОА розділяється на три частини: пам'ять S; комбінаційну схему Ф, яка реалізує мікрооперації; комбінаційну схему ψ, яка обчислює значення логічних умов. Пам’ять S забезпечує збереження слів s1, …sN, які представляють значення операндів D, проміжкові значення і кінцеві результати R. Для виконання мікрооперацій Y={ ym} служить комбінаційна схема Ф. Керуючі сигнали Y, що формуються управляючим автоматом УА, ініціюють виконання необхідних мікрооперацій. Так, якщо надходять сигнали ym1 і ym2, то схема Ф виконує дві мікрооперації що зводиться до обчислення значень і присвоєння їх словам. Для обчислення значень логічних умов служить комбінаційна схема ψ, що реалізує систему булевих функцій, значення яких представляються інформаційними сигналами X={xl}. №2 Компонентний склад ОС визначається набором функцій, для виконання яких вона призначена. Усі її програми можна поділити на дві групи: керуюча програма та системні обробляючі програми. Керуюча програма – обов’язковий компонент будь-якої ОС. Її функції – планування проходження безперервного потоку завдань, управління розподілом ресурсів, реалізація прийнятих методів організації даних, управління операціями вводу-виводу, організація мультипрограмної роботи, управління працездатністю системи після збоїв та інші. Керуюча програма скуладається з ряду компонентів, серед яких слід виділити чотири основних:
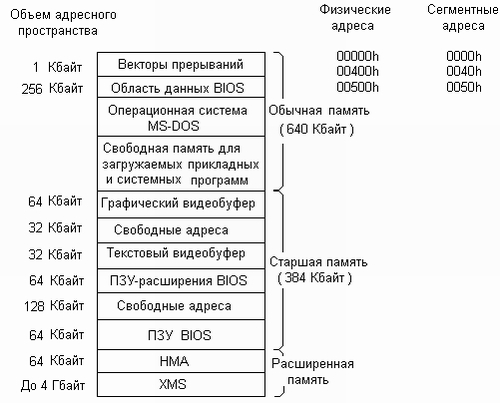
Управління статичними ресурсами (управління завданнями) виконує попереднє планування потоку завдань для виконання і статичний розподіл ресурсів між завданнями, що одночасно виконуються у процесі підготовки до виконання. До таких ресурсів відносяться розподіл пам’яті (основної, віртуальної, зовнішньої), доступні для використання завданням прострої, які припускають тільки монопольне використання, набори даних та інші. Такі ресурси закріплюються за завданням або його частиною з моменту його ініціалізації до моменту завершення та використовуються у монопольному режимі. Управління динамцічними ресурсами (управління задачами) виконує динамічний розподіл ресурсів системи між декількома задачами, які вирішуються одночасно, у мультипрограмному режимі. Ці функції виконують програми супервізора, які входять до ядра ОС, що постійно знаходиться у оперативній пам’яті. Управління даними забезпечує всі операції вводу-виводу (обміну між оперативною пам’яттю та периферійними пристроями) на фізичному та логічному рінях. Воно містить у собі ряд служб, які забезпечують виконання таких функцій, як управління каталогом, управління розподілом пам’яті прямого доступу, обробку помилок вводу-виводу та таке інше. Вони реалізують різні структури даних та можливість доступу до них. Управління поновленням реєструє машинні збої та відмови, і поновлює працездатність системи після збоїв, якщо це можливо. Системні обробляючи програми виконуються під управлінням керуючої програми, так саме, як і будь-яка обробляюча програма. Це значить, що вона у повному обсязі може користуватися послугами керуючої програми і не може самостійно виконувати системні функції. Так, наприклад, обробляюча програма не може самостійно виконувати власний ввод-вивід. Операції вводу-виводу обробляюча програма реалізує за допомогою запитів до керуючої програми, яка їх безпосередньо виконує. Централізоване виконання системних функцій керуючою програмою дозволяє виконувати їх більш ефективно та забезпечує високий рівень послуг для користувача. До системних обробляючих програм відносяться програми, які входять у склад ОС: асемблери, транслятори, редактори зв’язків, програми обслуговування та інші. Розподіл адресного простору Не слід думати, що терміни " адресний простір" і " оперативна пам'ять" еквівалентні. Адресний простір - це просто набір адрес, які уміє формувати процесор; зовсім не обов'язково всі ці адреси відповідають реально існуючим елементам пам'яті. Залежно від модифікації персонального комп'ютера і складу його периферійного устаткування, розподіл адресного простору може декілька розрізнятися. Проте, розміщення основних компонентів системи задоволене строго уніфіковано. Типова схема використання адресного простору комп'ютера приведена на мал. 1.5. Значення адрес на цьому малюнку, як і всюди далі в книзі, дані в шістнадцятиричній системі числення.
Мал. 1.5. Типовий розподіл адресного простору.
§ вхідний буфер клавіатури, куди поступають коди клавіш, що натискаються користувачем; § адреси відеоадаптера, а також послідовних і паралельних портів; § дані, що характеризують поточний стан відеосистеми (форма курсора і його поточне положення на екрані, відеорежим, використовувана відеосторінка і інш.); § осередки для відліку поточного часу і так далі Область даних BIOS заповнюється інформацією в процесі початкового завантаження комп'ютера, а потім динамічно модифікується системою в міру необхідності. Багато прикладних програм, особливо, написано на мові асемблера, звертаються до цієї області з метою читання або модифікації тих, що містяться в них даних. З деякими осередками області даних BIOS ми зіткнемося при розгляді прикладів конкретних програм. №3 хDSL (англ. digital subscriber line, цифровая абонентская линия) — семейство технологий, позволяющих значительно повысить пропускную способность абонентской линии телефонной сети общего пользования путём использования эффективных линейных кодов и адаптивных методов коррекции искажений линии на основе современных достижений микроэлектроники и методов цифровой обработки сигнала. Технологии хDSL появились в середине 90-х годов как альтернатива цифровому абонентскому окончанию ISDN. В аббревиатуре xDSL символ «х» используется для обозначения первого символа в названии конкретной технологии, а DSL обозначает цифровую абонентскую линию DSL (англ. Digital Subscriber Line — цифровая абонентская линия; также есть другой вариант названия — Digital Subscriber Loop — цифровой абонентский шлейф). Технологии хDSL позволяют передавать данные со скоростями, значительно превышающими те скорости, которые доступны даже самым лучшим аналоговым и цифровым модемам. Эти технологии поддерживают передачу голоса, высокоскоростную передачу данных и видеосигналов, создавая при этом значительные преимущества как для абонентов, так и для провайдеров. Многие технологии хDSL позволяют совмещать высокоскоростную передачу данных и передачу голоса по одной и той же медной паре. Существующие типы технологий хDSL различаются в основном по используемой форме модуляции и скорости передачи данных.
Службы xDSL разрабатывались для достижения определенных целей: они должны работать на существующих телефонных линиях, они не должны мешать работе различной аппаратуры абонента, такой как телефонный аппарат, факс и т. д., скорость работы должна быть выше теоретического предела в 56Кбит/сек., и наконец, они должны обеспечивать постоянное подключение. Широкое распространение технологий хDSL должно сопровождаться некоторой перестройкой работы поставщиков услуг Интернета и поставщиков услуг телефонных сетей, так как их оборудование теперь должно работать совместно. Возможен также вариант, когда альтернативный оператор связи берёт оптом в аренду большое количество абонентских окончаний у традиционного местного оператора или же арендует некоторое количество модемов в DSLAM. К основным типам xDSL относятся ADSL, HDSL, IDSL, MSDSL, PDSL, RADSL, SDSL, SHDSL, UADSL, VDSL. Все эти технологии обеспечивают высокоскоростной цифровой доступ по абонентской телефонной линии. Некоторые технологии xDSL являются оригинальными разработками, другие представляют собой просто теоретические модели, в то время как третьи уже стали широко используемыми стандартами. Основным различием данных технологий являются методы модуляции, используемые для кодирования данных. Методы кодирования Технологии xDSL поддерживают несколько вариантов кодирования информации: 2B1Q: Two-binary, one-quaternary, используется для IDSL и HDSL CAP: Carrierless Amplitude Phase Modulation - используется для HDSL DMT: Discrete multitone modulation, наиболее распространенный метод, известен также как OFDM (Orthogonal frequency-division multiplexing) Достижения технологий xDSL во многом определяются достижениями техники кодирования, которая за счет применения процессоров DSP (Цифровой сигнальный процессор) смогла повысить скорость передачи данных при одновременном увеличении расстояния между модемом и оборудованием DSLAM. Преимущества xDSL перед ISDN Широкое применение доступа через xDSL имеет ряд преимуществ по сравнению с технологией ISDN. Пользователь получает интегрированное обслуживание двух сетей – телефонной и компьютерной. Но для пользователя наличие двух сетей оказывается незаметным, для него только ясно, что он может одновременно пользоваться обычным телефоном и подключенным к Интернету компьютером. Скорость же компьютерного доступа при этом превосходит возможности интерфейса PRI сети ISDN при существенно более низкой стоимости, определяемой низкой стоимостью инфраструктуры.
|