Технические данные АСР скорости
13. Модели механизма управления
СИСТЕМА АВТОМАТИЧЕСКОГО
1. Диапазон регулирования скорости при использовании обратной связи по напряжению или э.д.с. 25:1. 2. Диапазон регулирования скорости при использовании обратной связи по скорости 75:1. 3. Погрешность стабилизации скорости вращения в статическом режиме не более 1 %. 4. Ограничение полного тока на заданном уровне с погрешностью не более 10 %. 5. Время реверса тока якорной цепи при подаче на вход регулятора тока ступенчатого сигнала не более 30 мс (время бестоковой паузы при этом не превышает 7 мс). 6. Погрешность стабилизации скорости вращения с применением прецизионного тахогенератора не более 0,1 %/
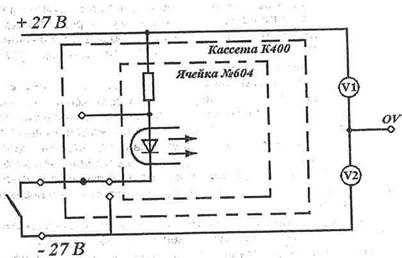
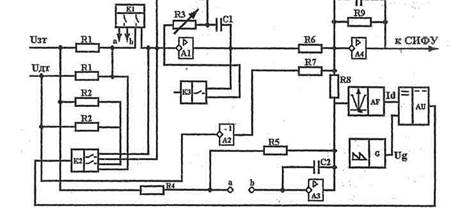
2. СИЛОВАЯ СХЕМА ЭЛЕКТРОПРИВОДА На рис.1 изображена силовая схема электропривода КТЭ с естественным воздушным охлаждением. Тиристоры в плечах преобразователя включены встречно-параллельно и образуют две мостовые схемы. Тиристорный преобразователь подключен к сети через трансформатор. Включение и отключение преобразователя рсуществляется автоматическим выключателем Q1.1. Нагрузка (якорная цепь двигателя) подключается через автоматический выключатель Q2.1. Тиристоры VD1 и VD2 замыкают цепь динамического торможения. Для защиты по току используется максимально токовый элемент FА герконового типа. В схеме показано подключение датчиков запирания мостов, необходимых для работы схемы логического переключающего устройства (принято раздельное управление группами вентилей). В схеме указаны также датчики тока и напряжения, выходные сигналы которых используются в системе регулирования скорости и системе защиты. Питание обмотки возбуждения осуществляется от однофазного тиристорного преобразователя, выполненного по мостовой однофазной схеме. Этот преобразователь подключается к сети 380В через реакторы. 3. УСТРОЙСТВО И РАБОТА АСР СКОРОСТИ АСР скорости (рис.2) комплектного тиристорного электропривода КТЭ относится к системам подчиненного регулирования координат и содержит в своем составе: регуляторы скорости, тока якоря и тока возбуждения; - устройства, обеспечивающие ввод сигнала задания от сельсинных командоаппаратов и источников постоянного напряжения; - устройство для исключения самохода двигателя при отсутствии сигнала задания и реактивном моменте на валу двигателя; - логические элёмёнты, обеспечивающие необходимый алгоритм - датчики тока якоря, тока возбуждения и напряжения двигателя; Датчики тока и напряжения, а также делители напряжения для устройств гальванической развязки аналоговых сигналов, располагаются у мест установки шунтов, с которых снимается сигнал. Устройство, обеспечивающее ввод сигнала задания от сельсинного командоаппарата, состоит из ячейки генератора № 703, предназначенной для питания сельсинов, и ячейки фазочувствительного выпрямителя № 207. Цепи питания и выходного сигнала сельсинного командоаппарата гальванически отделены от общей точки системы регулирования с помощью двух трансформаторов, размещенных в ячейке № 703. Питание сельсинного командоаппарата осуществляется напряжением прямоугольной формы с частотой 400 Гц. Преобразование переменного напряжения сельсинного ко- Выходной сигнал фазовыпрямительного устройства поступает на вход регулятора скорости через ячейку задатчика интенсивности скорости ЗИ-2АИ. На вход регулятора скорости поступает также сигнал " nТ" при подаче команд "Толчок вперед" (ТВ) или "Толчок назад" (ТН); Уровень сигнала регулируется с помощью резистора RЗ ячейки № 003 (обозначен " n T"), а его полярность зависит от того, какая из команд (ТВ или ТН) подана. Сигнал " nТ" блокируется при одновременной подаче команд "Толчок вперед" и "Толчок назад", а также при наличии команд "Рабочая скорость" или "Запрет задания". Кроме того, команды "Толчок вперед" и Толчок назад" блокируются при наличии команд "Ограничение хода вперед" и "Ограничение хода назад" соответственно. Перечисленные блокировки и команды реализуются на элементах ячейки № 222. Выходной сигнал регулятора скорости поступает на вход регулятора тока через задатчик интенсивности тока, расположенный в ячейке № 205, позволяющей плавно регулировать темп нараста- нала задания скорости расшунтирование регуляторов происходит практически без задержки, а шунтирование регуляторов происходит после уменьшения входных сигналов до порогового значения по истечении времени, которое определяется параметрами R27, С15, С16 и установкой потенциометра " тЗ и. При отсутствии тахогенератора (в зависимости от требований к электроприводу и условий работы) может быть использована обратная связь по э.д.с. двигателя. Напряжение, пропорциональное э.д.с. двигателя, выделяется на усилителе, расположенном в ячейке № 205. Этим усилителем обеспечивается плавная подстройка статической компенсации падения напряжения на активном сопротивлении якорной цепи с помощью резистора R1 и динамическая компенсация с помощью входного фильтра, имеющего сменные элементы. Стабилизация тока возбуждения осуществляется с помощью регулятора тока возбуждения, расположенного в ячейке № 003. Развязка всех внешних дискретных сигналов (команд), поступающих в АСР скорости, осуществляется с помощью оптронных разделителей, расположенных в ячейке №604, а развязка всех внешних входных и выходных аналоговых сигналов осуществляется через ячейки РТ- 4АИ (ячейка № 404 и 406). Для увеличения срока службы оптронов в устройствах гальванической развязки дискретных сигналов (ячейка № 604) необходимо обеспечить такой режим их работы, когда излучатель оптрона преимущественно обесточен. Подключение контактов, находящихся большее количество времени в замкнутом (нормально замкнутых) и разомкнутом (нормально разомкнутых) состоянии, показано на рис. 3 и 4. В системе предусмотрен ряд резервных элементов, устройств и цепей, используемых заказчиком для расширения функциональных возможностей проектируемых систем. С этой же целью на объединительных печатных платах кассет предусмотрена возможность изменения стандартных связей между элементами системы, исключение отдельных элементов и включение резервных элементов. Так как кассеты системы регулирования расположены в непосредственной близости друг от друга, то допускается осуществление перемонтажа не только в пределах кассет, но и между кассетами (без использования разъемов кассет).
,; Вис 3. Схема подключения замыкающихся контактов КТЭ
|