Система электромагнитного подвеса основана на эффекте магнитного притяжения электромагнита к феррорельсу. Сила притяжения к ФР, которая называется подъемной Fп, должна уравновешивать все нагрузки Fэ, действующие на экипаж, в том числе и силу веса экипажа.
При движении ЭМ вдоль ФР в них наводятся вихревые токи, создающие магнитный поток, размагничивающий основной магнитный поток. Возникающая при этом сила Fв может быть разложена на тормозную Fт, направленную против движения экипажа, и отталкивающую силу Fот, направленную против силы Fп. С ростом скорости движения экипажа влияние вихревых токов может достигнуть существенной величины и поэтому должно учитываться при расчете и конструировании ЭМ и ФР. Диаграмма взаимодействия сил в системе ЭМП показана на рис. (3, а) при неподвижном экипаже, а на рис. (3, б) при движении. Компенсация отталкивающей силы Fот осуществляется автоматически системой управления МП путем соответствующего увеличения тока в обмотке ЭМ, а тормозной силы Fт – соответствующим увеличением тягового усилия линейного двигателя.
Для удержания экипажа над путевой структурой в общем случае необходимы две стабилизирующие системы: в вертикальной и горизонтальной плоскостях. Наиболее просто это достигается применением двух независимых систем ЭМП. Одна из них осуществляет магнитное подвешивание экипажа в вертикальной плоскости, а другая является направляющей. Принципиальная конструктивная схема такого экипажа показана на рис. 4.
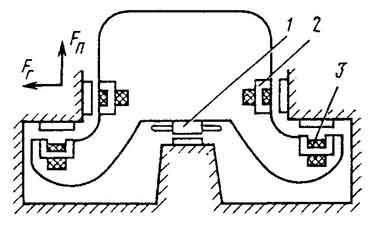
Рисунок 4 – Конструктивная схема экипажа с раздельной системой подвеса и направления:
1 – ЛД; 2 – ЭМ направления; 3 – ЭМ подвеса.
Структурная схема системы управления электромагнитным подвесом ВСНТ.
В данной работе используется довольно распространенная структурная схема системы управления электромагнитным подвесом ВСНТ.
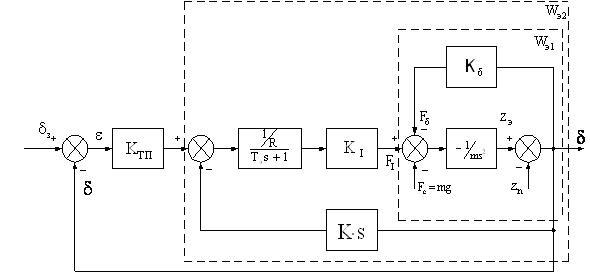
Рисунок 5 – Структурная схема системы автоматического регулирования зазора
На рис. 5 введены следующие обозначения:
– воздушный зазор между полюсами электромагнитов и феррорельсом;
– сигнал рассогласования;
– координата электромагнита;
– координата пути;
Тэ – постоянная времени электромагнита (ЭМ);
R – сопротивление ЭМ;
m – масса экипажа;
Kтп – коэффициент усиления вентильного преобразователя;
– коэффициенты передачи соответственно от тока и зазора к силе;
K – коэффициент передачи от скорости изменения зазора к ЭДС индукции.
ВСНТ – высокоскоростной наземный транспорт;
НДС – непрерывная динамическая система;
ДДС – дискретная динамическая система;
МП – магнитный подвес;
ЭМ – электромагнит;
ЭМП – электромагнитный подвес;
ЭДП – электродинамический подвес;
ППМ – подвес на постоянных магнитах;
КМП – комбинированный магнитный подвес;
ФР – феррорельс;
СУ – система управления;
СИЭМ – силовой исполнительный элемент;ЛД – линейный двигатель;




