ЭЛЕКТРОПРИВОД С ЛИНЕЙНЫМИ ДВИГАТЕЛЯМИ
ЭЛЕКТРОПРИВОД С ЛИНЕЙНЫМИ ДВИГАТЕЛЯМИ
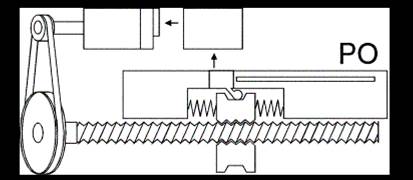
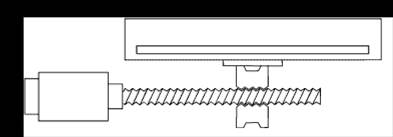
Введение. Приводы подач всех современных металлообрабатывающих станков с ЧПУ, в том числе и электроэрозионных (ЭЭ) строятся по традиционной схеме. Так, в одном из типажей ЭЭ станков перемещения рабочего органа РО (каретки подач) осуществляется от двигателя постоянного тока через ременную передачу на ходовой винт. Через шариковую гайку (она скреплена с РО пружинами механизма защиты от соударений) вращение винта трансформируется в продольное перемещение РО . Рис.1 Более надежные и современные приводы выполнены без ременной передачи. В этих приводах высокомоментный двигатель переменного тока непосредственно соединен с ходовым винтом.
Рис.2. Недостатки указанных видов приводов достаточно известны и очевидны: -большое количество промежуточных элементов от источника энергии до РО; -громадная инерционность этих элементов, особенно в крупногабаритных станках; -наличие зазоров в передающих устройствах; -трение во множестве сопрягаемых деталей (резко изменяющееся при переходе системы из состояния покоя в состояние движения); -температурные и упругие деформации практически всех передающих звеньев; -износ сопрягаемых элементов в процессе эксплуатации и потеря исходной точности; -погрешности в шаге ходового винта и накопленная погрешность по длине. Поскольку эти недостатки определяют основные качественные характеристики приводов (точность и равномерность хода РО, величину мертвого хода при реверсе, допустимые ускорения и скорости РО), конструкторская мысль станкостроителей давно пытается как-то уменьшить их влияние на работу приводов и оборудования в целом. Например, в соединении ходового винта с гайкой для уменьшения трения уже давно используют дорогое и сложное шариковинтовое соединение; для ликвидации зазоров в соединение винта с гайкой вводятся специальные устройства натяга соединения; ходовые винты особо точных станков изготавливают по классу эталонных; погрешности шага винтов пытаются скомпенсировать системами компенсаторов; в борьбе с температурными деформациями создаются изощрённые системы охлаждения и т.д. Проблемы, проблемы, проблемы... И уже давно ясно, что проблемы приводов с ходовыми винтами не решить никогда из-за их физико-технической сущности и построенного типа, как такового. Архаичность рассмотренных приводов давно очевидна и передовая конструкторская мысль уже много лет работала над задачей кардинальной замены типовых приводов в металлообрабатывающем оборудовании на какие-то другие, более совершенные. И таким решением стало использование в качестве приводов подач станков линейных двигателей.
Линейные шаговые двигатели
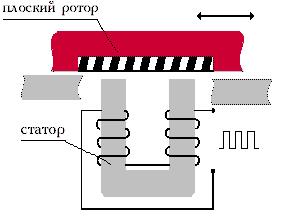
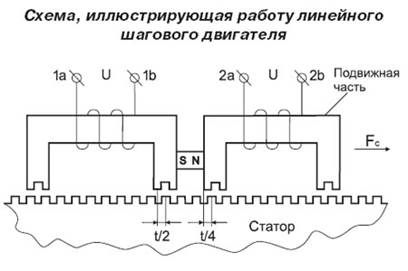
Статор линейного шагового двигателя представляет собой плиту из магнитомягкого материала. Подмагничивание магнитопроводов производится постоянным магнитом. Схемы управления. Управление ШД, как уже отмечалось, обеспечивается электронным блоком. Современные блоки управления ШД состоят из нескольких функциональных узлов, выполняемых по различным схемам и с использованием разнообразных элементов. Стремление расширить область применения дискретного привода, повысить качество и точность его движения, а также надежность, упростить наладку и эксплуатацию отразилось в унификации схем управления ШД. Рассмотрим обобщенную функциональную схему ЭП с ШД. Основная ее часть, обычно называемая разомкнутой схемой, выделена штриховой линией. Сигнал управления
Рассмотренная разомкнутая схема управления ШД не всегда обеспечивает высокие динамические свойства, точность и энергетические показатели ЭП. Поэтому современные схемы управления ШД содержат дополнительные узлы, с помощью которых характеристики ЭП улучшаются. К таким узлам относятся частотно - импульсный регулятор напряжения 11, усилитель обратной связи тока, блок электронного дробления шага 13, блок плавного разгона и торможения (задатчик интенсивности) 1, датчик положения ротора и скорости 7, и цифровой регулятор б. Регулятор 11 и усилитель 10, связанные с узлом сравнения 9, служат для автоматической стабилизации тока в обмотках ШД и подержания его момента, что существенно улучшает энергетические показатели работы двигателя. Стабилизация тока осуществляется введением отрицательной обратной связи по току, с помощью которой за счет регулирования частоты переключения регулятора (частотно-импульсная модуляция) изменяется среднее значение напряжения питания и тем самым регулируется ток в обмотках ШД. Задача формирования тока в обмотках ШД решается также при использовании коммутатора 5, обладающего свойствами источника тока. В этом случае отпадает надобность в обратной связи току и блоках 11 и 10. Для улучшения качества движения ШД при низких частотах повышения точности отработки входных импульсов управления помощью блока 13 уменьшается единичный шаг ШД. Улучшение динамических свойств дискретного ШД, в частности увеличение диапазона рабочих частот входного сигнала, значительно превышающих частоту приёмистости двигателя, может быть достигнуто введением в схему блока 1, обеспечивающего разгон и торможение двигателя с заданным темпом, при котором еще не происходит пропускание управляющих импульсов. При использовании блока 1 область рабочих частот шагового электропривода может бы увеличена в 2... 3 раза. Возможности дискретного ЭП расширяются при использовании замкнутых схем управления на основе датчика 7 и регулятора 6. В таком дискретном приводе информация о действительном положении вала и скорости ШД поступает на вход цифрового регулятора б, который обеспечивает заданный характер движения привода. Перспективы дальнейшего развития ЭП с ШД связаны с использованием микропроцессорных средств управления. В этом случае функции всех показанных на рисунке блоков управления, за исключением силового коммутатора, датчиков скорости и положения, выполняет микропроцессор по соответствующей программе. Как говорят в таких случаях, аппаратная реализация схемы управления ШД заменяется более гибкой и функционально богатой — программной. Область применения дискретного привода постоянно расширяется. Его используют кроме указанных ранее случаев в резательных и сварочных автоматах, часах, нажимных устройств прокатных станов, лентопротяжных и регистрирующих устройствах, в медицинской технике, в производстве элементов микроэлектроники и др. Существует большое разнообразие линейных двигателей.
Линейные двигатели с постоянными магнитами
Рис. 3 Такая система состоит из металлического сердечника-магнита и статорной обмотки. При подаче тока определенной полярности в обмотку сердечник сместится в ту или иную сторону, причем практически мгновенно. Изменение полярности сигнала на обмотку приведет к обратному ходу сердечника. Как видим, от источника энергии к РО нет никаких промежуточных элементов, передача энергии осуществляется через воздушный зазор, ничего не надо вращать, сразу возможно осуществление главной задачи - продольного движения РО. Гениальность решения, естественно, сразу была оценена по достоинству. На рассмотренном принципе уже десятилетия работают все элементы электроавтоматики, системы электротормозов, системы защиты, специальное оборудование ударного типа и т.д. Громадный опыт использования электромагнитных систем четко выявил их потрясающие достоинства: удивительная простота конструкции и применения, почти мгновенная остановка, мгновенный реверс, сверх быстрота срабатывания, большие усилия, простота настройки. Но не было только одного - возможности регулировать скорость РО в электромагнитной системе и обеспечивать тем самым регулируемое поступательное движение РО (сердечника). А без этой возможности применить электромагнитный привод (несмотря на его гениальность), как движитель в оборудовании, было невозможно. Потребовались многие годы работы ученых и конструкторов в разных странах, прежде чем был достигнут успех. Особенно интенсивно велись работы в Японии, где электромагнитный привод (уже как линейный привод) был впервые успешно использован как движитель для сверхскоростных поездов. Там же были попытки создания линейных приводов для металлообрабатывающих станков, но они имели существенные недостатки: создавали сильные магнитные поля, грелись, а главное не обеспечивали равномерности в движении РО. Лишь на пороге нового тысячелетия начался серийный выпуск станков (пока в основном электроискровых (электроэрозионных)) с принципиально новыми линейными двигателями, в которых решены все проблемы по обеспечению равномерным движением РО станков со сверхвысокой точностью, с большим диапазоном регулирования скорости, с громадными ускорениями, мгновенным реверсом, с простотой обслуживания и наладки и др. В принципе, конструкция ЛД изменилась не сильно. Собственно двигатель состоит всего из 2 (!) элементов: электромагнитного статора и плоского ротора, между которыми лишь воздушный зазор. Третий обязательный элемент – оптическая или другая измерительная линейка с высокой дискретностью (0,1 мкм). Без нее система управления станка не может определить текущие координаты. И статор, и ротор выполнены в виде плоских, легко снимаемых блоков: статор крепится к станине или колонне станка, ротор - к рабочему органу (РО). Ротор элементарно прост: он состоит из ряда прямоугольных сильных (редкоземельных) постоянных магнитов. Закреплены магниты на тонкой плите из специальной высокопрочной керамики, коэффициент температурного расширения которой в два раза меньше чем у гранита. Использование керамики совместно с эффективной системой охлаждения решило многие проблемы линейных приводов, связанные с температурными факторами, с наличием сильных магнитных полей, с жесткостью конструкции и т.п. Точная и равномерная подача РО во всем диапазоне скоростей и нагрузок обеспечивается двумя техническими решениями: крепление постоянных магнитов под определенным фиксированным углом, который был открыт в ходе длительных экспериментов; реализация высокоэффективной 6-ти фазной импульсной системы управления (система SMC). Особенно следует отметить простоту обслуживания ЛД, простоту периодической чистки (при необходимости), профилактики и ремонта. Так, чтобы заменить ротор ЛД, достаточно открутить несколько болтов, крепящих ротор к РО. Для замены статора помимо болтов нужно лишь снять две трубки системы охлаждения статора и отсоединить кабель. Сравните эти действия, например, с комплексом работ по снятию шаровой гайки или замене подшипника ходового винта. Эффективность применения новых приводов сразу же нашло убедительное подтверждение. Новая серия ЭЭ станков с ЛД имеет резко повышенные технико-технологические и эксплуатационные характеристики по сравнению с аналогичными станками, имеющими традиционные приводы. Так, производительность ЭЭ прошивных станков с ЛД выше, чем у станков с обычными приводами как минимум в 2 раза, а ЭЭ проволочно-вырезных – на 50%. Повысилась точность станков, расширились диапазоны параметров обрабатываемых деталей и т.д. Для объяснения этого необходимо рассматривать определенные тонкости ЭЭ технологий и работы ЭЭ оборудования, а это уже тема другая. Нижеследующая таблица позволяет зрительно сопоставить рассматриваемые привода.
Линейные асинхронные двигатели
Рис.4
Конструкция.
Принцип действия. s = (ω1 - ω2)/ ω1 (2.8) Линейный асинхронный двигатель в простейшем случае можно получить, если вращающийся двигатель разрезать по диаметру и развернуть на плоскости. При этом магнитное поле получается не вращающимся, а бегущим, и электрическая энергия преобразуется в механическую поступательного движения. Основное преимущество таких двигателей состоит в отсутствии кинематических цепей для преобразования вращательного движения в линейное, что существенно упрощает конструкцию приводимого в движение механизма и повышает его КПД. Существует большое разнообразие линейных двигателей. В настоящее время больший интерес проявляется к асинхронным линейным двигателям как относительно простым по конструкции.
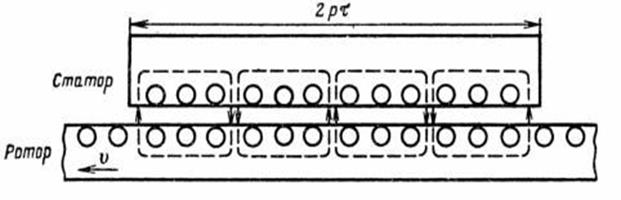
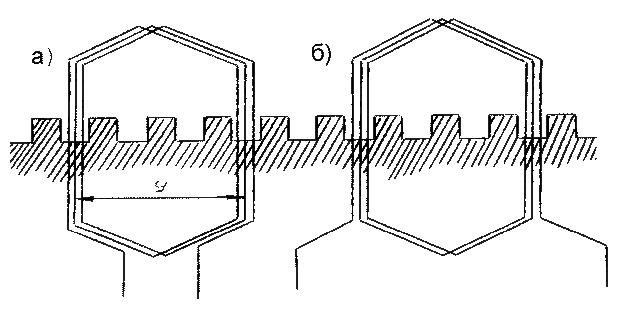
Рис.6 Развернутый в плоскость статор асинхронного двигателя является первичным элементом, а развернутый ротор вторичным элементом линейного двигателя (рис. 1). Распределенная обмотка статора. В распределенной обмотке в общем случае магнитные оси катушек не совпадают с результирующей магнитной осью обмотки. Катушка состоит из одного или нескольких последовательно соединенных витков, изготовленных из круглого или прямоугольного медного провода. Расстояние между сторонами катушки (витка) называется шагом катушки по пазам y и примерно равно полюсному делению τ.
Полюсным делением называется часть эквивалентной окружности ротора приходящаяся на один полюс:
Стальной сердечник первичного элемента выполняется шихтованным, а в его пазах укладывается многофазная (обычно трехфазная) обмотка. Вторичный элемент выполняется с короткозамкнутой обмоткой, уложенной в пазы стального сердечника, или представляет собой сплошную токопроводящую пластину. Пластина изготовляется из меди, алюминия или ферромагнитной стали. При включении обмотки первичного элемента в многофазную сеть образуется магнитное поле, которое перемещается вдоль магнитопровода со скоростью V1 = 2τf1 где τ; - полюсное деление; f1 - частота питающего напряжения. При своем перемещении магнитное поле индуктирует во вторичном элементе машины ЭДС. Эта ЭДС вызывает токи, от взаимодействия которых с магнитным полем образуется механическая сила (тяговое усилие), стремящаяся сдвинуть элементы относительно друг друга. В линейном двигателе в зависимости от его конструкции и назначения возможно относительное перемещение как первичного, так и вторичного элемента. Как и в обычном асинхронном двигателе, перемещение элемента происходит с некоторым скольжением относительно поля S = (v1 - v) / v1 где v - скорость движения элемента. Номинальное скольжение линейного двигателя равно 2-6%. На работу линейного двигателя оказывают существенное влияние краевые эффекты, возникающие из-за конечных размеров разомкнутых магнитопроводов элементов. Это приводит к ухудшению таких характеристик, как тяговое усилие, коэффициент мощности и КПД. Линейные двигатели могут быть успешно применены на ленточных и тележечных конвейерах, в приводах эскалаторов и движущихся тротуаров, в металлорежущих и ткацких станках, где рабочие органы совершают возвратно-поступательное движение. Большие перспективы имеет применение линейных двигателей для транспорта. Основным преимуществом линейного двигателя в этом случае является возможность получения высоких скоростей движения до 400-500 к
|
 в виде импульсов напряжения поступает, а вход блока 2 от программного или другого внешнего командного устройства. Блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, как необходимо для нормальной работа последующих блоков схемы управления. Распределитель импульсов 3 преобразует последовательность сформированных импульсов, например в четырехфазную систему однополярных импульсов напряжения, соответствующую числу фаз (обмоток) двигателя.
в виде импульсов напряжения поступает, а вход блока 2 от программного или другого внешнего командного устройства. Блок 2 видоизменяет эти импульсы, формируя их по длительности и амплитуде, как необходимо для нормальной работа последующих блоков схемы управления. Распределитель импульсов 3 преобразует последовательность сформированных импульсов, например в четырехфазную систему однополярных импульсов напряжения, соответствующую числу фаз (обмоток) двигателя. Импульсы с выхода распределителя 3 усиливаются с помощью промежуточного усилителя 4 и поступают на коммутатор 5, питающий обмотки ШД 8. Обычно коммутатор питается от источника постоянного тока (выпрямителя) 12 и обеспечивает в обмотках ШД пульсирующий ток одного направления.
Импульсы с выхода распределителя 3 усиливаются с помощью промежуточного усилителя 4 и поступают на коммутатор 5, питающий обмотки ШД 8. Обычно коммутатор питается от источника постоянного тока (выпрямителя) 12 и обеспечивает в обмотках ШД пульсирующий ток одного направления.