
СІМФЕРОПОЛЬСЬКИЙ ТЕХНІКУМ ЗАЛІЗНИЧНОГО ТРАНСПОРТУ
МІНІСТЕРСТВО ОСВІТИ І НАУКИ, МОЛОДІ ТА СПОРТУ УКРАЇНИ
МЕТОДИЧНІ ВКАЗІВКИ з виконання розрахункової частини курсового та дипломного проектування. тема: “Розрахунок механізму підйому стріли крану КЖДЕ-16,25”
з дисципліни: «Колійні машини» спеціальность: 5.05050204«Експлуатація і ремонт підйомно-транспортних, будівельних, дорожніх машин і устаткування»
РОЗРОБИВ: викладач Гень В.М.
20 _ г.
1 В С Т У П
Останніми роками керівництво Міністерства шляхів сполучення взяло курс на підсилення механізації у колійному господарстві. Наказом міністра шляхів сполучення РФ № 12 від 16.08.94 р. передбачено здійснення комплексу технічних, організаційних заходів щодо удосконалення експлуатаційної діяльності підрозділів колійного господарства та галузі в цілому. У першому ряду з цих заходів коштує упровадження нових машин і технологій. Для виконання поставлених завдань на залізниці зростає потужність колії, удосконалюється технологія і організація ремонтно-колійних робіт. Своєчасний і якісний ремонт колії веде до зниження витрат часу, праці та експлуатаційних витрат, підвищенню продуктивності праці на основі максимальної механізації всіх колійних робіт. Механізація у колійному господарстві розвивається з урахуванням впровадження нових ресурсозберігаючих технологій, що забезпечують тривалу стабільність колії, інтенсивності використання залізниці створюються та випускаються сумісно з ведучими закордонними фірмами високопродуктивні машини, які здатні виконувати роботи в перервах руху поїздів при високій якості робіт, Останнім часом особлива увага приділяється глибокій вирізці і очищенню баласту. У зв'язку з цим з'явилися нові технологічні процеси ремонту колії: оновлення і капітальний ремонт, ремонт баластної призми, середній і підйомний ремонт, планово-запобіжний з виправкою і так далі Але, головне завдання механізації колійних х робіт - підвищення якості робіт ремонту колії для збільшення міжремонтних термінів і зниження експлуатаційних витрат. Значний внесок до вирішення цих завдань внесли заводи: калузькій «Путьмаш»,«трансмаш», «Тулажеддормаш», Людіновський тепловозобудівний, Верещагинський по ремонту путніх машин і виробництву запасних частин, «Муромтепловоз», Тіхорецкий машинобудівний, Ярославський ВРЗ, Пермський МРЗ, Свердловський ПРМЗ, Абдулінський ПРМЗ, «Червоний шлях», Кировський машзавод, Комбарський, Царськосельський, Веліколукський локомотіворемонтний і ін. З іноземних фірм, що співробітничають з вітчизняними заводами, розробляючими і випускаючими путню техніку, можна назвати: «Плассер і Тойрер» (Австрія), АТ МТХ Прага, «Спено» (Швейцарія), «Тампер» (США), «Колмекс» (Польща), «Жейсмар» (Франція), «Компел» (Словника), «Симплекс Гідравлік» (ФРН), « Колгмінз» (Англія) і ін. Продукція ряду з них використовується на вітчизняних залізницях. Сучасні колієві машинні комплекси дозволяють «вийти» на так звану мало обслуговувану колію зі збільшенням міжремонтних термінів. Перед шляховиками завдання - ефективніше використовувати як що є, так і техніку, що знов поступає. Стоїть завдання – ефективніше використовувати техніку яка є так і нову. Наказом міністра шляхів сполучення № 12 введена нова класифікація шляху залежно від вантажонапруженості. Встановлені позначення шляхів, наприклад «1А1» - шлях належить до 1-го класу, групи А, категорії 1. Але, існуючі машини ще не забезпечують повної механізації всіх робіт. Якщо найбільш трудомісткі операції виконуються машинами, то ряд колійних робіт - за допомогою електричного і гідравлічного інструменту. Для завершення комплексної механізації потрібно створити ряд нових машин, а деякі з тих, що існують модернізувати. Велика роль в розвитку колійного машинобудування належить вітчизняним вченим та конструкторам, що працюють в науково-дослідних та проектно-конструкторських організаціях, в транспортних вузах, на заводах, які виготовляють машини.. При створенні машин особливу увагу приділяють наступним основним положенням: підвищенню швидкості та зусиль на робочих органів, створенню машин безперервної дії, що забезпечують підвищення продуктивності і зниження вартості робіт; широкому впровадженню гідроприводу, що дозволяє спростити кінематику, плавно регулювати швидкості руху, знижувати масу і металоємність машин, захистити приводи від перевантажень. Важливе значення має автоматизація роботи машин; застосування ЕВМ, що забезпечують оптимальні режими роботи завантаження двигуна, контроль якості виконання робіт; розробка робочих органів при оптимізації їх параметрів та режимів роботи; створення машин з широким набором обладнання для виконання різних операцій технологічного циклу з метою ефективного використання машини за часом і скорочення числа машин; збільшення надійності і довговічності машин, за допомогою використання більш міцних та стійких до зношення матеріалів, правильного відбору параметрів та режимів роботи; уніфікація вузлів, агрегатів і деталей як з різними типами колійних машин, так і з будівельними, підйомно-транспортними машинами, тракторами, автомобілями, рухомим складом. Велика увага приділяється також таким заходам, як вдосконалення машин з погляду ремонтопридатності, монтажу з легко замінюваних вузлів і агрегатів, а також полегшення технічного обслуговування (зручне розміщення систем мастила, регулювання, місць кріплення); створення машин для роботи в умовах холодного клімату; поліпшення умов роботи обслуговуючого персоналу - зниження вібрації і шуму, створення комфортабельніших кабін і пультів управління, забезпечення безпеки робіт. Для поточного змісту шляхів найважливішим завданням є машинізація робіт - виконання ремонтів важкими машинами в «вікно». Залізнична колія складається з верхньої будови, що сприймає зусилля від коліс рухомого составу і направляє їх рух і нижньої споруди (земляне полотно), яке є основою для верхньої споруди, а також штучних споруд (мостів, тунелів, водопропускних труб, шляхопроводів і так далі). Верхня споруда колії складається з рейок, шпал, скріпляють, баласту і додаткових елементів, а також стрілочних перекладів і мостового полотна. Найвідповідальніший елемент - рейки. Їх прокатують на металургійних заводах стандартної довжини 25 м У путньому господарстві знайшли широке застосування багатомоторні дизель-електричні крани КЖДЕ-16, КЖДЕ-163, КЖДЕ-251, КЖДЕ-253. У кожній парі цих кранів другою є модифікацією першого. Все 4 типи конструктивно уніфіковано.
2Конструктивно-технологічна частина
2.1 Призначення, класифікація та будова стрілових кранів Стрілові крани призначені для підйому і переміщення в обмеженому просторі вантажу, що підвішується до стріли, укріпленої на поворотній частині машини. Класифікують їх за призначенням, можливості пересування, типу приводів. За призначенням крани підрозділяють на портальних, будівельних, баштових, загального призначення і спеціальні (колієукладальні, для установки пролітних будов мостів і ін.). Крани бувають стаціонарні і пересувні. Останні можуть бути на залізничному, гусеничному або пнемо-колісному ходу. Залежно від типу силової установки крани бувають з двигуном внутрішнього згорання, дизель-електричні, парові. :.По кількості приводів крани підрозділяють на одномоторні, які працюють від одного двигуна, і багатомоторні, де кожен механізм має індивідуальний двигун, причому він може бути електричним або гідравлічним. Всі крани мають індекси, що складаються з буквеної і цифрової частин. Буквена частина позначає групу крана або 1 особливість його конструкції, а цифрова - вантажопідйомність. Незвично від типу конструктивна схема всіх пресувальних стрілових кранів однакова. У кожного з них дві платформи, в тому числі одна поворотна. Неповоротна опирається на ходову частину. Основними параметрами стрілових кранів є вантажопід¢ємність, висота підйому вантажу, шлях між верхнім і ніжним положенням крюка, вильоту стріли. вантажопід¢ємність крану обернено - пропорціональна вильоту стріли. Чим більше виліт стріли, тім менш вантажопід¢ємність. 2.2 Багатомоторні стрілові крани на залізничному ходу
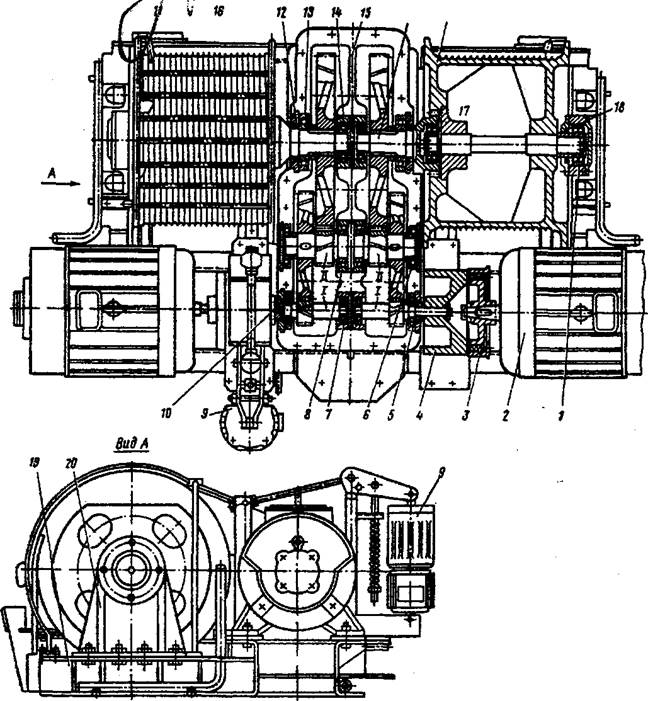
У путньому господарстві знайшли широке застосування багатомоторні дизель-електричні крани КЖДЕ-161, КЖДЕ-163, КЖДЕ-251, КЖДЕ-253. У кожній парі цих кранів другий є модифікацією першого. Все 4 типи конструктивно уніфіковано. Основні технічні характеристики кранів на залізничному ходу. Розглянемо кран КЖДЕ-16. Такий кран складається з поворотної платформи, на якій розміщено все устаткування: дизель з баком для олії, радіатором і акумуляторною батареєю, генератором; механізм повороту з електродвигуном; механізм підйому стріли з двигуном механізм підйому вантажу, що складається з барабанів, редуктора, гальм колодок і електродвигунів.На поворотній платформі також закріплена стріла з крюком, вантажним і стріловим поліспастом і встановлені пульт управління краном, сидіння, мотор-генераторна група електромагніту, панелі управління та контактна панель. Поворотна рама опирається на ходову раму, яка змонтована на двох візках. Переміщається кран двома механізмами пересування, кожен з яких складається з електродвигуна і осьового редуктора, що передає обертання провідній колісній парі При запасовці канатів для роботи з грейфером підйомний канат, закріплений одним кінцем на грейфері, обгинає один з нерухомих блоків стріли і намотується на барабан. Інший канат, який відчиняє та зачиняє челюсті грейфера, огинає блоки поліспаста грейфера і через блоки намотується на барабан. Для запасовці канатів стелопод'емного поліспаста до стріли, на кінці якої змонтована нерухома вісь з блоками поліспаста, кріпиться рухома обойма з блоками стрелопод'емного поліспаста. Канат через блоки нерухомої обойми 2 намотується на барабан стрелопод'емного механізму.
На нових кранах КЖДЕ-16 і КЖДЕ-25, що розробляються (кран залізничний дизель-електричний, покращена конструкція стріли, забезпечує гідравлічне винесення додаткових опор, встановлено дві швидкості робочого пересування кранів, покращено умови роботи операторів (зір, кондиціонування повітря).
Рисунок 1- Загальний вид крану КЖДЭ-16
Він представляє собою лебідку з поліспастом. Привод лебідки електричний. Кратність поліспаста механізму підйому вантажу вибирається по тім рекомендаціям що і для лебідок. На кранах з багатомоторним приводом встановлена електрична лебідка, у якій є барабан на котрий навивається вантажний канат. Щодо улучення виробництва кранів вантажопідйомності сприяє обладнання підйомної лебідки з двома електродвигунами. На кранах типу КЖДЄ-161 та КЖДЄ -163 обладнаних грейдерами встановлені два барабана. Барабани приводяться в рух від двох двигунів
Рисунок 2- Механізм підйому вантажу
2.4 Механізм зміни вильоту стріли
Для захоплення вантажів, що знаходяться на різних відстанях від осі крана, підйому їх на різну висоту та укладання на різні відстані, передбачена зміна вильоту стріли крана шляхом її нахилу у вертикальній плоскості. Можливо також переміщення вздовж стріли возка, як це зроблено в баштових та коліє викладальних кранах. На залізничних і автомобільних стріловидних кранах, використаний їх в путньому господарстві, зміна вильоту стріли досягається підйомом або опусканням її за допомогою стрелопод'емной лебідки з поліспастом. Крутячий момент у такій лебідки передається від електродвигуна через муфту з гальмом, черв’ячний редуктор та зубчату пару на барабан. При навивці каната на барабан стріла повертається навколо осі її кріплення на поворотній платформі. Конструкція механізму підйому стріли. Барабан обертається на осі в підшипниках. Привід барабану здійснюється електродвигуном 3 через черв'ячний редуктор і зубчату пару. На валу двигуна закріплена пальцева муфта з гальмівним шківом. Для гальмування служить гальмо колодки з електрогідравлічним штовхачем. Черв'як редуктора змонтований на наполегливих і радіальних підшипниках. Черв'ячне колесо встановлене на вихідному валу, який спирається на підшипники. На шліцах цього ж валу закріплена шестерня, що знаходиться в зачепленні із зубчатим колесом, прикріпленим до торця барабана, встановленого на підшипниках. Підшипники черв'яка змащуються через маслянки, а підшипники валу черв'ячного колеса - із загальної мастильної ванни, де рівень масла контролюється маслопоказателем.. Для запобігання попаданню пилу і витікання масла використовуються кришки, а також манжети, зубчата пара змащується графітним мастилом. Регулювання осьового люфта в підшипниках валу черв'ячного колеса здійснюється регулювальним гвинтом, а наполегливого підшипника черв’яка - регулювальною гайкою. Стріло - підйомна лебідка змонтована на рамі, розміщеної на поворотній платформі крану. .
2.5 Механізм повороту крану
Він служить для приведення в обертання поворотною частиною крану разом із стрілою і піднятим вантажем. Він складається з приводу і опорно-поворотного пристрою, що виконується у вигляді поворотної платформи із спеціальним опорним пристроєм або у вигляді колони. У стріловидних кранах на автомобільному і залізничному ходу поворотна платформа за допомогою катків, роликів або кульок спирається на обойму, встановлену на неповоротно1Нтсг11 крана. Опорно-поворотне улаштування для передачі тиску від поворотної плат, форми на раму ходової частини. Воно також сприймає перекидаючий момент, що діє на поворотну платформу при внецентренном додатку навантажень на стрілу і інші елементи крана. Можливе різне конструктивне виконання опорно-поворотного пристрою. У одному з них (мал. 2.29, а) на поворотній платформі 2 кріпляться опорні катки «3, катання, що спираються на круг, 4, змонтований на неповоротній платформі. Поворотна платформа центрується щодо неповоротною цапфою /, що сприймає перекидаючий момент, що виникає в процесі роботи крана. У пристрої іншого типу, окрім перерахованих деталей, передбачені зворотні катки 5, що котяться по нижній опорній поверхні поворотного круга 4, закріпленого на нерухомій платформі 6. Цими катками сприймається перекидаючий момент. У деяких конструкціях цього типу круг катання виконаний у вигляді жолоба (зігнутий швелер), в який вставлені опорні ролики. Нижні грані жолоба сприймають вертикальне навантаження, направлене вниз, верхні — вертикальні зусилля, направлені вгору, виникають від перекидаючого моменту. Кульковий (або роликове) пристрій ) складається із зовнішнього кільця I?, закріпленого на поворотній платформі, і внутрішнього 2—на неповоротною. Між кільцями розташовано один або два ряди опорних кульок / або роликів. Опорно - поворотним пристроєм стаціонарних та спеціальних консольних кранів які установлюють на щебнеочистітельних машинах, дрезинах є колонна. Такі крани виконують у двох варіантах: настінний з колоною, що обертається та вільно стоячи з нерухомою колоной.У колійному господарстві використовують настінні крани невеликої вантажопідйомності. Кінематична схема механізму повороту приведена на мал. де / — двигун; 2 — гальмо; 3 — редуктор; 4 — шестерня; 5 — зубчатий вінець опорно-поворотного пристрою. Опорноповоротний пристрій крана типу КЖДЕ-16 складається з ряду масивних кілець /, 2, 4, що мають канавки, в яких закладаються кульки 3. Між верхніми / і ніжним 4 кільцями поміщені прокладки 6 з текстоліту або пластмаси. Кульки затиснуті між кільцями, завдяки чому пристрій не тільки є опорою для кочення верхньої поворотної частини 5 крана, але і сприймає момент від її перекидання. Ущільнюючу роль грають прокладки 7. Концентрично опорному кільцю на нижній неповоротній рамі 8 встановлено кільце 2 із зубчатим вінцем. Замість кульок можуть бути використані також ролики, здатні сприймати великі зусилля. Розрахунок потужності приводу механізму поворотупочинають з визначення моментів сил, що виникають при обертанні крана від тертя в опорах, опори вітру і так далі
2.6Механізм пересування крана.
Крани на залізничному ходу переміщуються у процесі роботи на велику відстань за допомогою власного механізму переміщення. Крани МДЕ 63 з багатомоторним приводом мають два механізму переміщень на кожному візку. На зварній рамі 20 змонтовано механізми електродвигун 16, колодочний тормоз 15 з електрогідравлічним штовхальником, трьох східний редуктор 21 та осьовий підшипник 18. Механізм підвищено на рамі ходової платформи за допомогою двох шарнірних тяг 13, а також ланцюга. Осьовий підшипник 18 складається з підвалини та накривки У внутрішньому расточнике підшипника ставлять закладні полукришки з гумовим ущільненням, роз’ємна наружна обойма та роликопідшипник. Для можливості монтажу підшипника на осі колісної пари поєднаючі кільця роликової обойми ріжуть на дві половини. Від валу електродвигуна 16 через муфту обертання передається на вхідний вал Л редуктора, зубчатою парою 9 на другий вал редуктора, а зубчатою парою 4 – на третій вал, на якому знаходиться на шліцах шестерня 5, яка ковзає, та обертає роз’ємне зубчате колесо 1, та отже колісну пару 19. Вали редуктора опираються на підшипники 10,14,8,17,6. Колісна пара 19 ходового візка є вихідним валом редуктора. На шійці осі на шпонці 2 посаджено раз ємне зубчате колесо, 1 котре є відомим колесом третього ступеню редуктора та одночасно фіксує його від осевого переміщення по осі колісної пари за допомогою центруючого бортика. Шійка осі колісної пари є як би внутрішній обоймою раз ємного роликопідшипника 3 редуктора. Шестерня, яка ковзає 5 за допомогою вилки 22, валу 23 з рукояткою /2, виведеною за межі корпусу редуктора, може переміщатися уподовж по валу на шліцах і виходити із зачеплення з роз'ємним колесом вихідного валу редуктора. Таким чином здійснюється переклад механізму з робочого положення в транспортне і назад. Під час введення малої шестерні в зачеплення гальмо механізму має бути розгальмований, тоді вали редуктора зможуть провертатися за квадратний хвостовик вхідного валу //. Редуктор з транспортного положення в робоче можна перемикати тільки при вимкненому електродвигуні. Конічні підшипники другого і третього валів редуктора регулюють за допомогою регулювального гвинта 7. Мастило шестерень редуктора, а також підшипників (окрім витих роликопідшипників 3 ) здійснюється розбризкуванням масла шестернею 24, що сидить на осі 25, закріпленою в корпусі редуктора і такою, що приводиться в обертання одним із зубчатих коліс 9 першому ступеню редуктора. Роз'ємні роликопідшипники 3 і осьовий підшипник 18 змащують пресс-масленкой. Весь механізм зібраний на рамі 20. Кінематична схема цього механізму приведена на мал., де / — колісна пара; 2 — осьовий редуктор; 3 — гальмо; 4 — електродвигун. При русі крана по рейках виникають опори: тертя, від ухилу шляху, від вітрового навантаження, від інерційних сил, від криволінійності ділянки шляху.
Рисунок 4-Механізм пересування багатомоторного крану на залізничному ходу 3 Розрахункова частина Вага стріли крану – Qв = 22кН Вага вантажу, що піднімається на найбільшому вильоту стрілі – Qс Коефіцієнт корисної дії механізму обернення стріли визначаємо з відношення:
де
3.1 Визначаємо зусилля необхідне для підйому стріли
Рисунок 1-Схема для розрахунку механізму зміни вильоту стріли
3.1.1 Для знаходження зусилля опірності обернення стріли Fс треба скласти рівняння моментів всіх сіл, які діють на стрілу відносно вісі її обертання точки 0.
Відкіля знаходимо:
Fc = е, де Qr - вага вантажу і вантажозагарбного пристрою; Qc - вага стріли; Н1 – опірність, створювана вітровим тиском на вантаж; Н - опірність, створювана вітровим тиском на стрілу; Fk - зусилля в робочої ветві вантажопідйомного поліспаста; L, 1.h1, h,d,e – плечі прикладання, відповідних навантажень відносно вісі обертання стріли к.О.
3.1.2 Визначаємо значення відповідних величин. Зусилля в робочий ветві вантажопідйомного поліспаста визначаємо за формулою:
Fk a an
де а = 2 – кількість кінців каната, закріплених на барабані; an = 3 – кратність поліспаста;
Fk = ________ _54.6 ______ = 9.38 КН, 2 3 0.99 0.98
3.1.3 Вітрове навантаження на стрілу визначаємо з відношення:
Н = Рв Sc КН, де Sc = 2.0 м2 підвітряна площа стріли; Рв = 0.4 кН/м2 – вітрове навантаження приймаємо по ГОСТ 1431-77 (для робочого стану крана); Н = Рв Sc = 0.4 2 = 0.8 кН; Н = 0.8 кН; 3.1.4 Вітрове навантаження на вантаж визначаємо з відношення: Н1 = Рв Sгр кН, де Sгр =- 4.0 м2 підвітряна площа вантажу; Рв = 0.4 кН/м2; Н1 = 0.4 4.0 = 1.6 кН; Н1 =1.0 кН. 3.1.5 Визначаємо зусилля опірності оберту стріли з відношення:
Fc = е 54.6 ·17 + 22 ·8.25 +1.6· 6.65 + 0.8· 4.56 - 9.38 ·9.2 = 346.1(кН) 2.5 Fc = 346.1 кН.
3.2 Визначаємо зусилля в сталевому канаті стріло підйомного механізму і вибір каната 3.2.1 Зусилля в канаті стрілопідйомної лебедки визначаємо за формулою:
Fk = Fc__ ____ кН, a an
де а = 1 – кількість кінців каната, зачепленого на барабані стріло підйомної лебедки; an = 6 – кратність стріло підйомного поліспаста;
Fk = 346.1__ ____ = 59.67 кН, 1 6 0.99 0.98 де Fk = 59.57 кН. 3.2.2 Визначаємо розривне зусилля в сталевому канаті стріло підйомної лебедки:
Fp = k Fk,
Згідно «Правил» для стрілових кранів з машинами привідом при середньому режимі роботи найменших значень коефіцієнта запасу міцності к = 5. Fp = k Fk = 5 59.67 = 297.8 кН; Fp = 297.9 кН; По таблицях ГОСТ 3077-80 приймаємо канат подвійної свивки діаметром d=18мм, а розривним зусиллям конструкції [Fp] = 297 kН; За каталогом обираєм двигун ЛК - 0.6 х 19 (1 + 9 + 9) +100
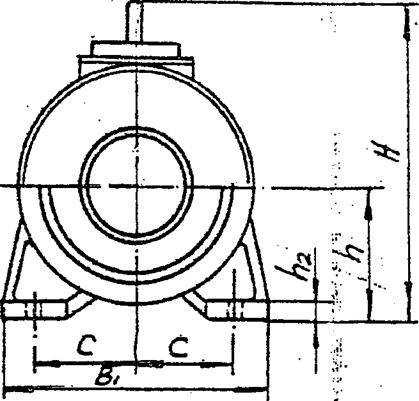
3.3 Визначення основних розмірів барабана. Перевірка стінок барабана на стягування
Рисунок 2-Схема для розрахунку основних розмірів барабану
3.3.1 Номінальний розрахунковий діаметр барабана вимірюється по центру противобіжних перерізів каната, приймаємо з відношення:
D
Де е – коефіцієнт, який залежить від типа та режиму механізму для (стрілових механізмів е = 18); D D Виходячи з конструктивних уявлень, приймаємо: D Діаметр робочої поверхні барабана; D1 = Dб - dk = 500 – 22 = 478 мм; D1= 478 мм; Приймаємо барабан з одношаговою навивкою з мелкою нарію, кріплення каната накладки; Крок канавок: t=1.2 dk = 1.2 22 = 26.4 мм; t= 26.4 мм; 3.3.2 Довжину каната, навитого на барабан стрілопідйомної лебедки при зміні вильоту стріли від найбільшого до найменшого значення визначаємо з відношення:
Lk = l
Де l an - 6 – кратність стріло підйомного поліспаста; Lk = 2.32· 6 = 10.8 (м); Lk = 10.8 м; 3.3.3 При одношоговій навивці кількість навитих на барабан вітків складає:
Zр = Hmax = 10.8___ = 7 вит, π D
де Zр= 7 витків, Повна кількість вітків складає: Zр = 7 витків. 3.3.4 Повна кількість вітків складах:
Zn = Zр + Zнз,
Де Zn – кількість вітків каната, які не належать звиванню з барабана. 3.3.4 При відомій конструкції барабана загальна його довжина складах:
L
де l lk - довжина барабана для кріплення каната; lp - довжина робочої частини барабана; l l lk = 3 t = 3 26.4 = 79.2 мм; lk = 79.2 мм; lp = Zn t = 9 26.4 = 237.6 мм; lp = 237.6 мм; L L Приймаємо загальну довжину барабана L 3.3.5 Товщину стінки барабана визначаємо з відношення:
3.3.6 Оболонка барабана знаходиться у зложеному напруженому стані, випробування напруження згину При цьому, для барабанів, задовольняючих відношенню L
Де [ 20 26.4 3.3.7 Внутрішній діаметр барабана визначається з відношення: D2 = D1 - 2 D2 = 478 – 2 20 = 478 -40 = 438 мм; D2 = 438 мм.
3.4 Визначаємо швидкість наматування каната на барабан, кількість обертів барабана на встановлюючи потужність необхідну для підйома стріли з вантажом 3.4.1 Визначаємо швидкість набігання канату на барабан стріло підйомного механізму за формулою:
де Lk = 10.8 м – довжина канату, який наматується на барабан; t = 40 сек – час качання стріли; uk = uk = 0.27 м/сек. 3.4.2 Оберти барабана визначаємо з відношення:
nб =
nб = nб = 10.32 оберт\хв.
3.4.3 Розрахункову потужність приводу стріло підйомного механізму визначаємо за формулою:
Рр=
Рр = Рр = 22.97 кВт.
3.5 Вибір електродвигуна та редуктора. Виробляємо кінематичний розрахунок стріло підйомного механізму За каталогом обмираємо електродвигун МТКF – 412 -26 потужністю Р = 26 Квт, ПДВ = 715 оберт./хв. Що відповідає даним умовам Рр ≤ [P] 3.5.1 Загальна передаточна кількість стріло підйомного механізму знаходиться за формулою:
Uм =
Загальна передаточна кількість стріло підйомного механізму розбиваємо на дві ступені: I ступень Up – передаточна кількість редуктора; II ступень - Uзп – передаточна кількість відкритої зубчатої передачі; На підставі існуючих конструкцій червоних редукторів стрілових кранів приймаємо Up = 30; Тоді передаточна кількість зубчатої передачі Uзп = Uзп = 2.30; Таким чином приймаємо існуючу конструкцію редуктора для стріло підйомного механізму стрілового крану Up = 30 та відкриту зубчату передачу з Uзп = 2.30.
Рисунок3-Редуктор стрелопод'емного механізму
Рисунок4-Електродвигун стрелопод'емного механізму
3.6 Розрахунок відкритої зубчатої передачі
Визначення міжосьовий відстані Крутячий момент на барабані 14259,3 нм 3.6.1 Передаточна кількість відкритої зубчатої передачі:
[σн]=
Приймаємо для відкритої зубчатої передачі матеріал – сталь 45 Х поліпшена з НВ =245 де σнlmb - межа контекстної передачі витривалості при базової кількості циклів; σнlmb = 2 НВ + 70 МПа; НВ = 245 МПа; knl = 1/0 – коефіцієнт, довговічності, який враховує вплив строку служби режиму навантаження для відкритої передачі. Таким чином:
[σн]=
[σн] = 509 Н/мм2; knl = 1.0 – коефіцієнт, враховуючий нерівномірність розподілу навантаження по ширині вінця зубчатого колеса, зв’язаний з деформацією валів і самих зуб їв коліс. 3.6.2 Граничні напруження згину при розрахунку на втому визначається за формулою:
[σF] =
Де НВ = 245 МПа; [SF] =
[SF] = 1.75 1.3 = 2.275;
[σF] = [σF] = 194 Н/мм2.
3.6.3 Визначаємо міжвісівну відстань відкритої зубчатої передачі з відношення:
де kа = 49.5 – коефіцієнт для прямозубних зубчатих передач;
|




 м =
м = 

 Мс = QrL + Qc1 + H1 h1 + H h – Fk d –Fc l;
Мс = QrL + Qc1 + H1 h1 + H h – Fk d –Fc l;


 = e· dk,
= e· dk, 3.0 D
3.0 D  ,
, ;
;
 (оберт./хв);
(оберт./хв); ,
, ;
; ,
, ;
;

 2,
2, ,
, Н/мм2,
Н/мм2, = 1.8 НВ МПа – межа витривалості згідно базової кількості циклів
= 1.8 НВ МПа – межа витривалості згідно базової кількості циклів ;
; = 1.75 – враховує нестабільність якостей матеріалу зубчатих колес;
= 1.75 – враховує нестабільність якостей матеріалу зубчатих колес; = 1.3 – засіб виготовлення заготівлі зубчатого колеса;
= 1.3 – засіб виготовлення заготівлі зубчатого колеса; 2;
2;
 ,
, = 0.16 – коефіцієнт ширини вінця зубчатого колеса по відношенню до міжвісівої відстані в співвідношенні ГОСТ 2185-66;
= 0.16 – коефіцієнт ширини вінця зубчатого колеса по відношенню до міжвісівої відстані в співвідношенні ГОСТ 2185-66; = 49.5 (3.02 +1)3
= 49.5 (3.02 +1)3  ;
;


