
Самара 2009
Автоматизация Строительства Методические указания Утверждено Редакционно-издательским Советом университета Января 2008г Самара 2009
Составитель С.Я Галицков УДК 69.002.5
АВТОМАТИЗАЦИЯ СТРОИТЕЛЬСТВА: методические указания для студентов-заочников сост. С.Я. Галицков; Самарск. гос. арх.-строит. ун-т. - Самара, 2009. - 18с. В методических указаниях приводятся программа дисциплины, задания контрольной работы, методические указания её выполнения. Рекомендуются для студентов-заочников специальности 270102 «Промышленное и гражданское строительство» при изучении курса и выполнении контрольной работы по дисциплине «Автоматизация строительства» (5-й курс, 9-й семестр).
Настоящие методические указания не могут быть полностью или частично воспроизведены, тиражированы (в том числе ксерокопированы) и распространены без разрешения Самарского государственного архитектурно-строительного университета.
Ó Самарский государственный архитектурно-строительный университет, 2009
Общая часть Современные строительные машины, технологическое оборудование предприятий строительной индустрии оснащены устройствами автоматики. Они позволяют существенно повысить качество строительного производства, обеспечить безаварийность строительных работ, создать комфортные условия труда при эксплуатации машин и оборудования, решить задачи автоматической диагностики машин и оборудования и тем самым повысить их надежность. Методические указания включают в себя программу дисциплины «Автоматизация строительства», задания для контрольных работ и рекомендации по их выполнению. Контрольная работа состоит из четырех заданий. В первом задании рассматриваются общие вопросы и задачи автоматизации строительства. Второе задание посвящено изучению методов и средств автоматизации строительной техники и оборудования строительной индустрии. В третьем задании изучаются методы структурного анализа системы автоматического управления с использованием математического аппарата передаточных функций. Четвертое задание посвящено освоению вопросов устойчивости динамических систем, показателей качества процесса управления. 1. ПРОГРАММА ДИСЦИПЛИНЫ «АВТОМАТИЗАЦИЯ СТРОИТЕЛЬСТВА» 1. Основы автоматизации строительства. 1.1 Задачи автоматизации строительства. 1.1.1 Автоматизация землеройно-транспорных машин. 1.1.2 Автоматизация буровых работ. 1.1.3 Автоматизация бестраншейной прокладки инженерных коммуникаций. 1.1.4 Автоматизация свайных работ и укладки труб. 1.1.5 Автоматизация дорожного строительства. 1.1.6 Автоматизация монтажных работ. 1.1.7 Автоматизация мобильных бетоносмесительных установок. 1.1.8 Диагностика состояния машин, узлов, агрегатов. 1.1.9 Учет выполнения работ и контроль их качества. 1.2 Основы теории автоматического управления. 1.2.1 Понятия об управлении, системе автоматического управления, объекте управления, управляющем устройстве. 1.2.2 Классификация систем автоматического управления и регулирования. Принципы автоматического управления. 1.2.3 Оператор системы. Линейные и нелинейные САУ. Уравнение линейных систем. Понятие о передаточной функции. 1.2.4 Частотные характеристики. Типовые воздействия. 1.2.5 Типовые динамические звенья: апериодическое, колебательное, интегрирующее, дифференцирующее, безинерционное звенья, звено запаздывания. 1.2.6 Передаточные функции линейных систем при типовых соединениях звеньев. 1.2.7 Понятие устойчивости. Необходимое и достаточное условие устойчивости линейных систем. Критерии устойчивости Рауса-Гурвица, Михайлова, Найквиста. 1.2.8 Показатели качества процесса управления. Методы их обеспечения. 1.3 Управляющее устройство. 1.3.1 Датчики (первичные преобразователи) систем управления: реостатные и потенциометрические, тензометрические, индуктивные, емкостные, фотоэлектрические, генераторные. 1.3. 2 Усилители и преобразователи: электронные, гидравлические, пневматические. 1.3.3 Аппараты управления. 1.3.3.1 Реле: электрические контактные, магнитоэлектрические, индукционные, электротепловые, времени. 1.3.3.2 Контактные аппараты управления. 1.3.3.3 Бесконтактные устройства управления. 1.3.3.4 Вспомогательные устройства. 1.3.4 Задающие и исполнительные устройства. 1.3.4.1 Задающие устройства. 1.3.4.2 Электрические исполнительные устройства. 1.3.4.3 Гидравлические и пневматические исполнительные механизмы. 1.3.4.4 Регулирующие органы. 2. Роботизация строительства. 2.1 Основные сведения по роботизации строительства. 2.1.1 Понятие робота, манипулятора. Классификация поколений строительно-монтажных манипуляторов (СММ). 2.1.2 Устройство управлением манипулятором. 2.1.3 Технические характеристики СММ и их классификация по технологии строительных работ. 2.1.4 Автоматические захватные устройства. 2.1.5 Приводы манипуляторов: привод постоянного тока, асинхронные электроприводы. 2.1.6 Виды управления манипуляторами: дистанционное, интерактивное, автоматическое. 2.2 Информационные системы манипуляторов и роботов. 2.2.1 Состав информационной системы. 2.2.2 Датчики внутренней информации. 2.2.3 Датчики внешней информации. Управление с применением информационных систем. Командное и командно-ассоциативное управление. 3. Автоматизация строительных процессов. 3.1 Автоматизация бетонных работ в монолитном домостроении. 3.1.1 Основные технологические операции бетонных работ. Задачи комплексной механизации. 3.1.2 Шарнирно-распределительные стрелы. 3.1.3 Манипулятор для выполнения бетоноукладочных работ. Манипулятор для укладки и сварки арматурных стержней. 3.1.4 Робототехническая система для чистовой затирки и шлифовки бетонных полов. 3.1.5 Манипулятор для подачи и распределения бетона. 3.1.6 Автоматизация скользящей (передвижной) опалубки. 3.1.7 Устройство инженерных коммуникаций. 3.2 Автоматизация монтажных работ. 3.2.1 Автоматизация монтажа строительных конструкций. 3.2.2 Автоматизация монтажа технологического оборудования. 3.2.3 Автоматизация погрузочно-разгрузочных и вспомогательных работ. 3.3 Автоматизация сваебойного оборудования. 3.3.1 Технология свайных работ и задача автоматизации. 3.3.2 Устройства для выверки свай по вертикали, контроля положения в плане, высотной отметки погружения сваи. 3.3.3 Устройство для определения несущей способности свай. 3.3.4 Использование лазерных датчиков при сооружении свайных фундаментов. 3.4 Автоматизация технологического процесса работы бурильной машины. 4. Автоматизация строительных и подъемно-транспортных машин. 4.1 Автоматизация землеройно-транспортных машин. 4.1.1 Задачи автоматизации землеройно-транспортных машин. 4.1.2 Копания грунта как объект управления. САУ стабилизации нагрузки по тяговому усилию. 4.1.3 Гидропривод по схеме «золотник-гидроцилиндр». 4.1.4 Машины с электромеханическим приводом «мотор-колесо». 4.1.5 Автоматическая планировка откосов автогрейдером на базе аппаратуры «Профиль-10». 4.1.6 Автоматизация автогрейдеров на базе микропроцессорной САУ с лазерными датчиками. 4.1.7 Автоматизация бульдозеров. 4.1.8 Автоматизация копания грунта одноковшовыми экскаваторами. 4.1.8.1 Электропривод экскаватора. 4.1.8.2 САУ заданной глубины копания. 4.1.8.3 Автоматическое регулирование заданной глубины копания. 4.2 Автоматизация машин при устройстве твердых покрытий. 4.3 Автоматизация непрерывного контроля уплотнения грунта. 4.4 Автоматизация строительно-монтажных кранов. 4.4.1 Задачи автоматического управления кранами. 4.4.2 Защита от опрокидывания и угона ветром. 4.4.3 Защита от опасного приближения к ЛЭП. 4.4.4 Ограничители грузоподъемности. 4.4.5 Автоматизация учета работы. 4.4.6 Автоматическое ограничения зон работы крана. 5. Автоматизация производства строительных материалов и конструкций. 5.1 Автоматизация технологического процесса дробления в замкнутом цикле. 5.1.1 Автоматическое управление мобильной дробильно-сортировочной машиной. 5.1.2 Автоматическое регулирование производительности щеколвых дробилок. 5.2 Автоматизация мобильных бетоносмесительных установок. 5.2.1 Технологическая схема бетоносмесительной установки. Классификация систем управления. 5.2.2 Релейные и микропроцессорные системы управления дозаторами. 5.2.3 Микропроцессорные системы управления бетоносмесительными установками. 5.2.4 Автоматизация дозаторов непрерывного действия. 5.2.5 Автоматическое регулирование однородности бетонной смеси. 5.2.6 Автоматический учет расхода цемента на бетоносмесительных установках. 5.2.7 Автоматический учет цемента, прошедшего через циклический дозатор в процессе приготовления бетонных смесей и растворов. 5.2.8 Бесконтактные автоматические расходомеры контроля потока цемента в трубопроводах при его пневмотранспортировке. 5.3 Автоматизация поточно-транспортных технологических систем.
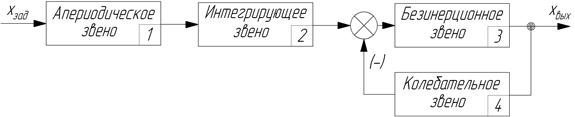
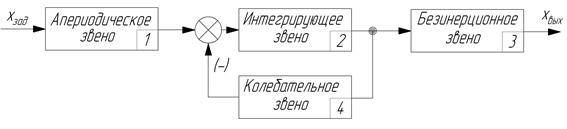
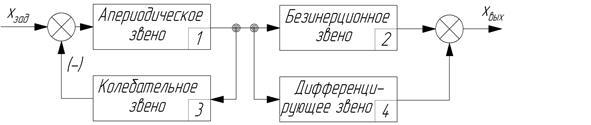
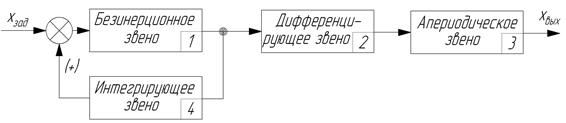
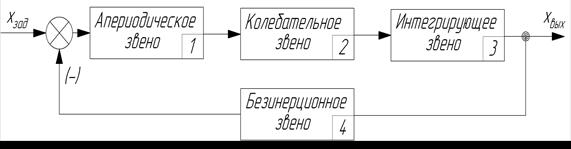
2. ЗАДАНИЯ КОНТРОЛЬНОЙ РАБОТЫ Задание 1 1. Дать определение системы автоматического управления, объекта управления и видов воздействия. Принцип автоматического управления по отклонению. 2. Автоматизация землеройно-транспортных машин. Классификация динамических типовых звеньев. Безинерционное звено. 3. Показатели качества процесса управления. Методы их обеспечения. 4. Дать описание единичного ступенчатого воздействия. Интегрирующее динамическое звено. Автоматизация дорожного строительства. 5. Дать определение устойчивости автоматической системы. Типы соединений динамических звеньев. Автоматизация бетоносмесительных установок. 6. Классификация систем автоматического управления. Автоматизация свайных работ. 7. Устойчивость систем автоматического регулирования. Критерий устойчивости Михайлова. Информационная система промышленного робота. 8. Усилители и преобразователи систем автоматического управления. Критерий устойчивости Гурвица. 9. Измерительные приборы и датчики, используемые в системах автоматического управления технологическими процессами в строительстве. 10. Критерий устойчивости Найквиста. Автоматизация буровых работ. Задание 2 1. Автоматизация сваебойного оборудования. 2. Автоматическая планировка откосов автогрейдером. 3. Системы автоматизации поточно-транспортных линий. 4. Применение промышленных роботов в строительстве. 5. Автоматизация монтажных работ. 6. Автоматические устройства защиты строительно-монтажных кранов. 7. Автоматизация копания грунта одноковшовым экскаватором. 8. Приводы манипуляторов: электрические, гидравлические, пневматические. 9. Автоматическое управление дробильно-сортировочной установкой. 10. Системы автоматического дозирования сыпучих материалов и жидкостей. Задание 3 Задана структурная схема системы (таблица 2.1). Она состоит из нескольких типовых динамических звеньев. Требуется найти выражение передаточной функции Таблица 2.1- Варианты 3-го задания
Таблица 2.1- Продолжение
Таблица 2.1- Продолжение
Задание 4 Определить, устойчива или не устойчива система, рассмотренная в третьем задании, если параметры её динамических звеньев имеют значения, приведённые в таблице 2.2. При решении задачи использовать критерий устойчивости Рауса–Гурвица. Таблица 2.2 - Параметры динамических звеньев
Таблица 2.2 -Продолжение
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ ЗАДАНИЙ КОНТРОЛЬНОЙ РАБОТЫ Определение номеров вариантов Номера вариантов заданий определяются по двум последним цифрам номера зачётной книжки студента и таблице 3.1. Верхняя строка таблицы соответствует последней цифре номера зачётки, левый столбец – предпоследней цифре. Набор цифр в ячейках обозначает последовательность номеров вариантов в первом, втором, третьем и четвертом заданиях соответственно. Например: номер зачётной книжки студента 94673. Берем две последние цифры 73. По таблице 3.1. определяем номера вариантов контрольной работы: 3200. Это означает, что в первом задании выполняется 3-й вариант, во втором – 2-й, в третьем – 10-й четвёртом – 10-й.
Таблица 3.1. Выбор вариантов заданий
Указания к заданиям №1 и №2. Используя рекомендуемую литературу, изучить существо вопроса, указанного в задании. Изложить изученный материал в письменной форме. К описанию должны быть даны схемы, чертежи, графики, поясняющие данный вопрос. Указания к заданию №3. Необходимо изучить основные типовые динамические звенья систем автоматического регулирования: безинерционное, апериодическое, дифференцирующее, интегрирующее, колебательное, звено запаздывания. Передаточные функции звеньев приведены в таблице 3.2. Таблица 3.2 – Типовые динамические звенья
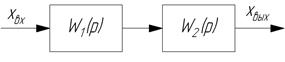
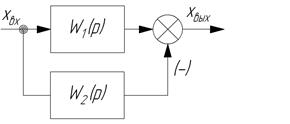
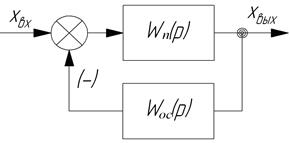
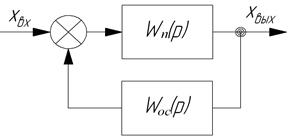
Соединение звеньев может быть последовательным, параллельным и обратная связь (отрицательная или положительная). Выражения передаточных функций систем, образованных при этих соединениях, приведены в таблице 3.3. Таблица 3.3 – Типовые соединения звеньев
Таблица 3.3 –Продолжение
При выводе передаточной функции системы, структура которой обусловлена заданием 3, параметрам каждого звена (постоянная времени Т, коэффициент подачи К и т.д.) целесообразно присвоить индекс, соответствующий номеру этого звена. Искомую передаточную функцию системы следует представить в следующем виде:
где коэффициенты Указания к заданию №4 Для выполнения задания рекомендуется изучить известные критерии устойчивости, в частности алгебраический критерий Рауса – Гурвица. При оценке устойчивости системы (3.1) необходимо использовать её характеристический полином, представляющий собой знаменатель А(p) передаточной функции (3.1). Критерий Рауса-Гурвица. Для устойчивости системы с характеристическим полиномом Определитель Гурвица составляется по правилу: по главной диагонали из левого верхнего угла до правого нижнего записываются последовательно коэффициенты, начиная с а1 до ап. Затем заполняются столбцы – выше диагонального элемента записываются коэффициенты с возрастающими индексами, ниже - с убывающими, недостающие коэффициенты заменяются нулями. Диагональные миноры получают путём последовательного вычерчивания нижней строки и правого столбца, двух нижних строк и двух правых столбцов и.т.д.
Например, для системы 4-го порядка определитель Гурвица
его диагональные миноры
Библиографический список 1. Тихонов, А.Ф. Автоматизация и роботизация технологических процессов и машин в строительстве. /– А.Ф. Тихонов. М.:Изд-во АСВ, 2005. – 464с. 2. Булгаков, А.Г. Автоматизация и роботизация строительных процессов и производств. /–А.Г.Булгаков. М.:Изд-во РИА, 2006. – 242с. В 2-х частях. Ч.1. 3. Булгаков, А.Г. Автоматизация и роботизация строительных процессов и производств. /–А.Г.Булгаков. М.:Изд-во РИА, 2006. – 430с. В 2-х частях. Ч.2. 4. Брюханов, В.И. Автоматизация производства. /–В.И. Брюханов. М.:Высш.шк., 2005. – 367с. 5. Добронравов, С.С. Строительные машины и основы автоматизации. /–С.С. Добронравов, В.Г. Дронов. М.: Высш.шк., 2001. – 575с. 6.Востриков, А.С. Теория автоматического управления./–А.С. Востриков, Г.А. Французова. М.:Высш.шк., 2004. – 365с. 7.Бесекерский, В.А. Теория систем автоматического управления./–В.А. Бесекерский, Е.П. Попов. СПб.; изд-во «Профессия», 2003. – 752с. 8.Ерофеев, А.А. Теория автоматического управления./–А.А. Ерофеев. СПб.: Политехника, 2001. – 302с.
Оглавление
Учебное издание Составитель С.Я. Галицков
|
 системы, применяя правила структурных преобразований.
системы, применяя правила структурных преобразований.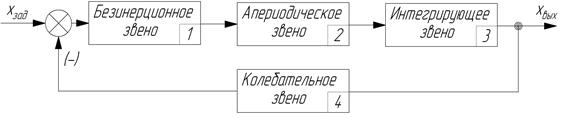










 , (3.1)
, (3.1) ,
,  ,...,
,...,  и
и  ,
,  , ...,
, ...,  , о пределяются параметрами динамических звеньев, входящих в систему. Необходимо (по результатам структурных преобразований) найти аналитические выражения этих коэффициентов.
, о пределяются параметрами динамических звеньев, входящих в систему. Необходимо (по результатам структурных преобразований) найти аналитические выражения этих коэффициентов. необходимо и достаточно, чтобы определитель Гурвица
необходимо и достаточно, чтобы определитель Гурвица  и его диагональные миноры
и его диагональные миноры  были положительны.
были положительны. (3.4)
(3.4) ,
, ,
,  ,
,  .
.


