Логическая задача
ѕ управления дискретными элементами электроавтоматики станка на уровне дискретных двоичных сигналов. Приемники сигналов ѕ реле и им подобные устройства. Источники ѕ концевые выключатели. Логическая задача использует операции и циклы автоматики. Операция ѕ элементарное действие типа «включить», «выключить», «опросить». Цикл автоматики ѕ это совокупность операций, связанных причинно-следственными отношениями. Реверсирование двигателя главного движения.
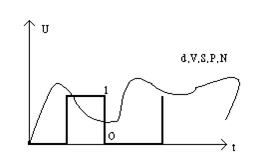
Командами кода ISO, вызывающими логическую задачу ЧПУ, является М(вспомогательная функция), Т(поиск инструмента), S (задание частоты вращения шпинделя). S ѕ вызывает логическую задачу, если частота вращения шпинделя изменяется ступенчато. Автоматическая коробка скоростей (АКС).
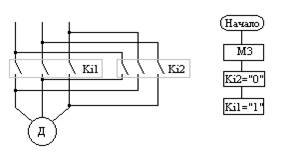
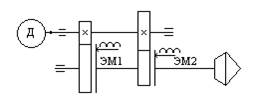
Пусть в программе задана некоторая частота вращения S1. S1®ЭМ1= «1» (ЭМ2= «0») S2®ЭЬ2= «1» (ЭМ1= «0») Одним из наиболее сложных циклов автоматики является процедура смены инструмента в станках с инструментальными магазинами (поиск инструмента, замена инструмента). Поиск осуществляется управлением движения магазина, смена управления манипулятора. 2 Геометрическая задача ЧПУ. Это такое управление движениями формообразования, при котором требование чертежа материализуются в готовом виде. Форма изделия определяется движениями подач. Геометрическая задача ѕ задача управлениями цепями (приводами) подач. Получение изделия сводится к обеспечению требуемого движения. Обеспечить движениеѕ значит задать следующие его параметры: траектория, скорость, направление, путь, исходная точка. «Формальная» запись геометрической задачи сводится к записи текста кадра управляющей программы в коде ISO, содержащих информацию о пяти параметрах. Nѕ номер кадра. Gѕ траектория. Fѕ подача. Sѕ число оборотов шпинделя. X, Y, Zѕ направление и путь. Для обеспечения заданного движения, в станке существует специально заданная вычислительная процедура, называемая интерполяцией. Она преобразует информацию кадра в управляющее воздействие на регулируемые приводы подач. Привод должен подчиняться определенной модели. Она сводится к определению скорости по раздельным координатам.
a=arctg(Dy/Dx)
Fy=F*sina Ux=k*Fx Uy=k*Fy Ux, Uy ѕ управляющие и подаваемые с ЦАП на теристорные приводы.
R2=(X-I)2+(Y-J)2 a=arctg[(Y-I)/(X-J)] Fy=F*cosa Fx=F*sina В зависимости от наличия или отсутствия контроля текущего положения рабочих органов ЧПУ делятся на замкнутые и разомкнутые.
Количество таких цепочек определяется количеством регулируемых приводов. * 3 Технологическая задача ЧПУ Эта задача получения изделия с требуемым качеством минимальными затратами. Технологическая задача возникает всякий раз, когда необходимо управление процессом резания. Технологическая задача делится на три подзадачи.
Начальная установка ѕ процесс автоматической привязки системы координат детали и станка. Статическая настройка ѕ процесс автоматической привязки систем координат станка, детали и инструмента, без учета возмущающих воздействий процесса резания. Динамическая настройка ѕ процесс автоматической привязки систем координат детали, станка и инструмента, с учетом возмущающих воздействий процесса резания. Начальная установка.
Компенсация погрешностей сводится. Для совмещения систем координат необходимо определить, например, угол. Для этой цели необходимо: технические средства, программные средства. Станок должен выполнять функции КИМ (контрольно-измерительной машины). Например, при помощи датчика касания. РИС. Статическая настройка. Позволяет компенсировать некоторые систематические погрешности при обработке деталей. Коррекции на размер инструмента ѕ есть во всех ЧПУ и реализуются автоматически, вызываясь специальными подготовительными функциями. РИС. * Динамическая настройка ѕ это оснащение станка системами адаптивного управления. 4 Терминальная задача ЧПУ Связь, обеспечивающая УЧПУ с внешней средой (оператором и ЭВМ верхнего уровня).
Основной формой общения оператора с ЧПУ является диалог. Следовательно, средством диалога будет клавиатура, дисплей. Помимо указанных средств обмен информацией может происходить через принтер, перфоленту, дисководы. Дисплей для индикации: текущего кадра программы, координат, технологической информации, информации аварийных ситуаций, статико-графической и динамико-графической информации. Избыток информации притупляет внимание. Используется постраничная организация дисплеев. Диалог с ЭВМ верхнего ранга Как правило управляющая ЭВМ и ЭВМ верхнего ранга (АСУ, САПР) относятся к различным типам. Формат посылки данных необходимо стандартизировать. Поэтому введено понятие Interface.
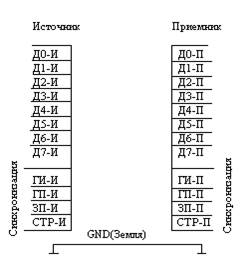
Интерфейс ѕ устройство согласования.
Последовательность обмена: При наличии сигналов ГИ и ГП в течение периода t1, приемник формирует сигнал ЗП. В течение периода t2 источник выставляет данные на шине Д0 ѕ Д7 и формирует сигнал СТР (данные истинны). В течение времени t3 приемник считывает данные и снимает сигнал запроса ЗП. В течение времени t4 после снятия ЗП источник снимает сигнал СТР и данные. С поступлением сигнала ЗП цикл повторяется. Интерфейс Centronix специально предназначен для принтера и в целях конкретизации конфликтных ситуаций в него введены дополнительные сигналы. Из интерфейса Centronix путем объединения некоторых сигналов можно получить ИРПР. ИРПС
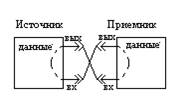
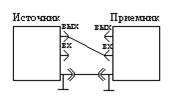
Как в приемнике, так и в передатчике, должно быть устройство, преобразующее параллельную информацию в последовательную и наоборот. Каждый байт анализируется побитно. Синхронизация обмена достигается за счет установки одинаковых скоростей обмена. Стандарт предусматривает следующую сопроводительную информацию: скорость; формат посылки(5,6,7,8 бит); проверка на четность(паритет); количество стартовых (1) и стоповых (2) битов. Отличительной особенностью ИРПС является устойчивость к помехам. ИРПС работает с 20 мА, Стык-С2 с 12 В. ИРПС (токовая петля 20 мА)
Стык С2
5. Архитектура УЧПУ 2С-42.
Шина – совокупность разъемов под платы (интерфейсы, соединенная параллельными проводниками). Первая шина – общая шина – стандартная типовая для ЭВМ МС1201. Общая шина имеет 16 разрядов, по которым передаются сигналы адреса и данных.
А/D15 A/D0
Помимо общей шины в УЧПУ имеется специальная шина называемая – станочная магистраль, отличающаяся от общей: а). Шина адреса и шина данных разведены (отдельно). б). От шины адреса взяты только четыре разряда А1, А2, А3 и А4. Это нужно для упрощения конструкции интерфейсных битов ЧПУ. Адаптер магистрали – отсеивает адреса битов не входящих в заданный диапазон. Заданный диапазон: 0167640…167700. На примере станка 6Р13 ЦАП. Рассмотрим особенность ЦАП станка как программируемого устройства с точки зрения системного программного обеспечения (СПО). С точки зрения пользователя, в том числе не самой высокой квалификации, программирование ЦАП сводится к набору в шине управляющей программы адресов координат X, Y, Z и подач. Трансляция кадра в управляющее воздействие на ЦАП регулируется процедурой интерполяции, алгоритм которой записан в системном программном обеспечении (СПО) аналог операционной системы. Для хранения СПО имеется ПЗУ – постоянное запоминающее устройство. Особенности СПО в работе с ЦАП определяются его структурой, а шина его адресом и набором передаваемых в его данные. * 6 Характер сигналов технологического процесса. Различают два основных типа сигналов: аналоговые и дискретные.
Аналоговые сигналы характеризуются тем, что в некоторых разумных пределах они могут принимать практически любое значение. Дискретные сигналыѕэто сигналы, которые принимают только два значения и отвечают на вопрос «ДА» и «НЕТ» или «0» и «1». Источников являются концевые выключатели, контактного и бесконтактного вида.
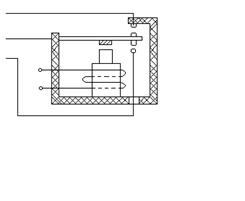
Катушка 1 с сердечником выполняющим функцию электромагнита, если напряжение питания не подано ѕнаходится в нулевом положении, пружина 2 закреплена консольно, контактирует с группой контактов названых «НЗ» (нормально замкнутые) и не контактирует с контактами «НР» (нормально разомкнутые) (см. Элетросхему). При подаче питания пружина 2 притягивается к сердечнику 1. «НР» замкнутся «НЗ» разомкнутся.
НР=f(Uпит) НЗ=f(1/Uпит). Несмотря на многообразие уровней единичных сигналов все они называются дискретными, но уровни единицы в различных оборудованиях разные. Реле выполняет функцию согласования уровней двоичных сигналов, а именно пусть Uпит=24 В, а через контакты можно пропустить 220В. Источник сигналов концевой выключатель. Данный конечный выключатель является устройством контактного типа, т.е. для его срабатывания необходим контакт ролика с сухарем или кулачком установленном на контролируемом объекте. Существуют бесконтактные концевые выключатели, у которых изменение положения пластины, замыкающей контакты происходит пол действием магнитного поля, магниты установлены на контролируемом объекте, такие датчики называются ѕ герон. Специфической формой сигналов являются импульсные сигналы, по форме и характеру напоминают дискретные и отличаются лишь упорядоченностью и постоянством периода.
7 ·Теория жизненного цикла Пусть, за период существования изделия, на предприятии было выпущено b– партий изделия, с n- штук в каждой. t1 – время, затраченное на механическую обработку одного изделия. t2 - время, затраченное на подготовку выпуска партии изделий (установка старого приспособления, замена старого приспособления на новое, ознакомление наладчика с чертежом и т.п.) t3 - время, затраченное на проектирование данного изделия, (конструкторский период, технологический период, адаптационный период.) Определим совокупные затраты времени по производству партии деталей.
Определим совокупные затраты времени по производству одной детали.
В массовом производстве
В единичном производстве
Уменьшение времени производится с помощью следующих средств: t1 – станки с ЧПУ; t2- промышленные роботы; t3 – САПР.
|
 .
.
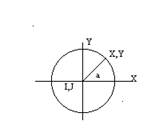 Fx=F*cosa
Fx=F*cosa




 УЧПУ имеет две самостоятельные шины.
УЧПУ имеет две самостоятельные шины.