Существует множество вариаций схем датчиков перемещения, основанных на различных оптических эффектах. Пожалуй, наиболее популярной является схема оптической триангуляции — датчик положения является, по сути, дальномером, который определяет расстояние до интересующего объекта, фиксируя рассеянное поверхностью объекта излучение и определяя угол отражения, что даёт возможность определить длину d — расстояние до объекта (Рисунок 3). Важным достоинством большинства оптических датчиков является возможность производить бесконтактные измерения, кроме того такие датчики обычно довольно точны и имеют высокое быстродействие. 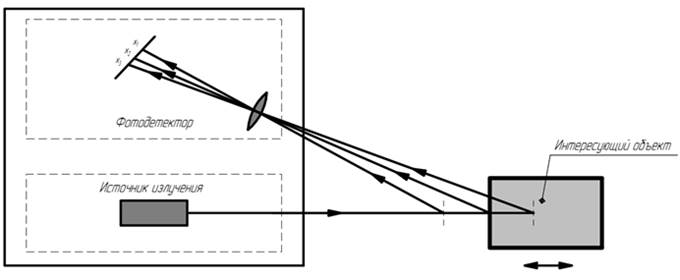
Рисунок 3. Оптический датчик перемещения на основе схему оптической триангуляции.
В другой реализации оптического датчика, предназначенной для регистрации и определения параметров малых перемещений и вибраций, используется двойная решётчатая конструкция, а также источник света и фотодетектор (Рисунок 4). Одна решётка неподвижна, вторая подвижна и может быть механически закреплена на интересующем объекте или каким-либо способом передавать датчику его движение. Малое смещение подвижной решётки приводит к изменению интенсивности света, регистрируемой фотодетектором, причём с уменьшением периода решётки точность датчика возрастает, однако сужается его динамический диапазон.

Рисунок 4. Оптический датчик перемещения на основе дифракционных решеток.
Дополнительными возможностями применения обладают оптические датчики, учитывающие поляризацию света. В таких датчиках может быть реализован алгоритм селекции объектов по отражательным свойствам поверхности, т.е. датчик может «обращать внимание» только на объекты с хорошей отражающей способностью, прочие объекты игнорируются. Разумеется, чувствительность к поляризации негативно сказывается на стоимости подобных устройств.




