Рекомендации по конструированию приводов
Компоновки приводов. Приводы бывают нераздельными и раздельными. Нераздельный привод выполняется в виде комплекса коробки скоростей и шпиндельного узла, помещаемых в общий корпус. Такая конструкция компактна, но часто имеет неудовлетворительные динамические характеристики и теплостойкость, так как колебания и выделяемая в коробке теплота передаются на шпиндель. Раздельный привод состоит из коробки скоростей и шпиндельной бабки, выполненных в разных корпусах. Движение от последнего вала коробки скоростей поступает к шпиндельной бабке через ременную передачу. Для увеличения диапазона регулирования в шпиндельную бабку иногда встраивают перебор. Шпиндельный узел в раздельном приводе нагревается меньше. Колебания, возникающие в коробке скоростей, на шпиндельный узел не передаются.
Компоновки приводов с автоматической коробкой скоростей (АКС) на основе электромагнитных муфт рассмотрим подробнее. Для таких приводов (рис. 4.8.) характерны большой диапазон регулирования частоты вращения шпинделя при постоянной мощности, высокая жесткость механической характеристики, высокий КПД, сравнительно низкая стоимость. Рис.4.8. Приводы с автоматической коробкой скоростей При применении автоматической коробки скоростей регулирование частоты вращения возможно под нагрузкой. В моменты пуска, торможения, реверса, а также при прерывистом и неравномерном резании в приводе возникают динамические нагрузки. Их значение и характер зависят от структуры привода и его динамических свойств. Исследование главных приводов токарных станков с автоматической коробкой скоростей показало, что при импульсном возмущении лучшим по критерию динамических нагрузок является привод, в котором имеются фланцевое соединение двигателя с входным валом АКС и ременная передача между АКС и шпиндельной бабкой (ШБ). Из-за ограничений на максимальный диаметр шкива и число ремней рекомендуется применять узкие клиновые и поликлиновые ремни, а также зубчато-ременные передачи. Если первый вариант невозможен и ременную передачу необходимо поместить между двигателем и АКС, для уменьшения динамических нагрузок рекомендуются облегченные шкивы (из алюминия, пластмассы).
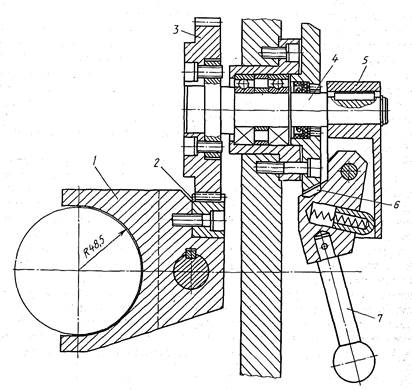
Рис.4.9. Схемы механизмов переключения коробок скоростей Механизмы переключения коробок скоростей. Механизмы индивидуального непосредственного управления характеризуются тем, что каждый зубчатый блок переключается отдельной рукояткой, связанной с ним непосредственно (рис. 4.9, а) или через зубчато-рычажную передачу (рис. 4,9, б) (при перемещении блока на большое расстояние). С целью облегчения управления и уменьшения размеров панели управления две или три рукоятки целесообразно расположить на одной оси (рис. 4.9, в). Механизмы группового управления позволяют переключать группу колес с помощью одной рукоятки путем переменного ее присоединения к элементам, связанным с этими колесами (рис. 4.9, г). Хотя количество рукояток уменьшается, длительность переключений возрастает. Механизмы централизованного последовательного управления позволяют переключение всех колес и других элементов от одного органа управления. Они выполняются в виде кулачкового механизма с барабанным (рис. 4.9,д) или дисковым кулачком (рис. 4.9, е), а также могут включать в себя кривошипно-кулисный (рис. 4.9, ж) или кривошипно-кулисно-кулачковый механизм. Управление с помощью кулачков становится централизованным, но процесс переключений длительным, невозможен предварительный набор скоростей, механизм управления громоздкий. Пазы могут быть расположены на обеих сторонах плоского диска. Селективные механизмы позволяют набрать заданную частоту вращения еще до окончания работы станка на предыдущем режиме. Наиболее распространены механизмы с пальцевыми или реечными толкателями (рис. 4.9, з), а также с коническим селектором и балансирами (рис. 4.9, и). Для переключения вращения селектор отводят от толкателей или балансиров, поворачивают до требуемого положения, а затем перемещают в осевом направлении. В зависимости от расположения органов управления механизмы позволяют непосредственное или дистанционное управление. В состав гидравлического механизма дистанционного управления входят цилиндр со штоком, соединенным с вилкой переключаемого зубчатого блока, и маслораспределитель в виде гидравлического крана, золотника или гидроселектора. При использовании рукоятки и передаточного рычага приводной сухарь перемещается по окружности, смещаясь от оси вала, по которому передвигается зубчатое колесо (рис.4.10., а, б). Принимают А=R–f и допускают f £0,3с. При проектировании механизма управления с рукояткой и передаточным рычагом, исходя из требуемых перемещений s зубчатого блока или ползушки и допускаемых углов поворота рукоятки, определяют размеры деталей механизма. При большом перемещении зубчатого блока рычажным механизмом значение f выходит за допустимое, и в этом случае необходимо применять зубчато-рычажную передачу (рис. 4.10, в). Для перемещения зубчатого блока с небольшим расстоянием между венцами применяют охватывающую вилку (рис 4.10, г). С целью уменьшения износа трущихся поверхностей принимают t = lc. Обычно втулка с вилкой перемещаются по скалке (рис. 4,10. д, е). Принимают (рис 4.10., ж): d =(l,5-l,6) d; l1 =(1,2-1,5) d; l2=(2,0-2,5)d. Конструкция зубчато-рычажного механизма приведена на рис. 4.11. От рукоятки 7 через ступицу 5, ось 4 и зубчатое колесо 3 движение передается ползушке 1, соединенной с рейкой 2. Рукоятка снабжена фиксатором 6.
Рис. 4.10. Элементы механизмов переключения коробок скоростей
Рис. 4.11. Зубчато-рычажный механизм переключения частот вращения
|