Пример. Ранее была приведена структурная схема адаптивного компенсатора помех и результаты моделирования его работы в простейших условиях.
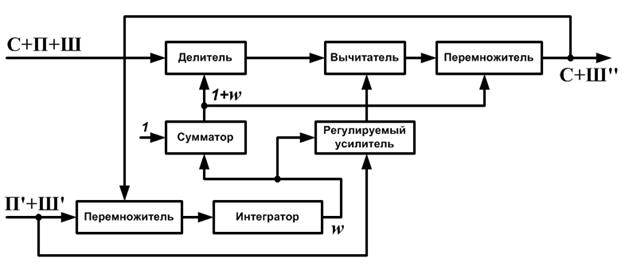
Ранее была приведена структурная схема адаптивного компенсатора помех и результаты моделирования его работы в простейших условиях. При практической реализации этой схемы могут возникнуть проблемы, связанные с необходимостью увеличения коэффициента усиления, что в ряде случаев невозможно из-за ограниченного динамического диапазона цепи настройки (в частности, регулируемого усилителя). Кроме этого, при больших уровнях помехи в основном и дополнительном каналах невозможно обеспечить компенсирующий сигнал необходимого уровня из-за нелинейности передаточной характеристики регулируемого усилителя. Для повышения эффективности адаптивного компенсатора помех предложена схема, приведенная на рисунке 5.50. Данное техническое решение позволяет значительно уменьшить время адаптации (либо при том же времени адаптации уменьшить остаточную ошибку компенсации) и одновременно расширить динамический диапазон канала настройки путем введения дополнительного весового коэффициента в основной канал приема.
Рисунок 5.50. Структурная схема модифицированного адаптивного компенсатора помех
Схема работает следующим образом. При наличии помехи на входе основного и дополнительного каналов возрастает весовой коэффициент w на выходе коррелятора, увеличивая коэффициент передачи регулируемого усилителя и, следовательно, долю помехи на втором входе вычитателя. Одновременно с этим снижается уровень сигнала в основном канале (на первом входе вычитателя). Это производится с помощью делителя, на втором входе которого формируется весовой коэффициент (1 + w). Таким образом, настройка ведется одновременно по основному и дополнительному каналу, ускоряя процесс адаптации. Тем самым уменьшается время сходимости без изменения постоянной времени интегратора. Для восстановления уровня сигнала основного канала до исходной величины на выходе вычитателя может применен дополнительный перемножитель. На рисунках …5.51 – 5.54 приведены результаты сравнительного моделирования традиционного (рисунок 5.45) и модифицированного адаптивных компенсаторов помех. Для наглядности исследование динамических свойств производилось в отсутствии полезного сигнала и шума, при одинаковых уровнях помехи на входе основного и дополнительного каналов. Видно, что время установления (время достижения уровня 0.9 от установившегося значения) для модифицированной схемы уменьшается примерно в 2 раза по сравнению с известной схемой. Сравнительный анализ можно произвести с помощью различных зависимостей. На рисунке 5.51 приведены кривые настройки весовых коэффициентов для обеих схем компенсаторов, причем зависимости были пронормированы относительно установившегося значения. На рисунке 5.52 показаны осциллограммы сигнала ошибки, наглядно демонстрирующие преимущества модифицированного алгоритма. На рисунках 5.53, 5.54 сравнение производится на фазовой плоскости по виду фазовой траектории сигнала ошибки. Из рисунков видно, что при одинаковых начальных условиях фазовая траектория для модифицированной схемы значительно быстрее достигает установившегося значения.

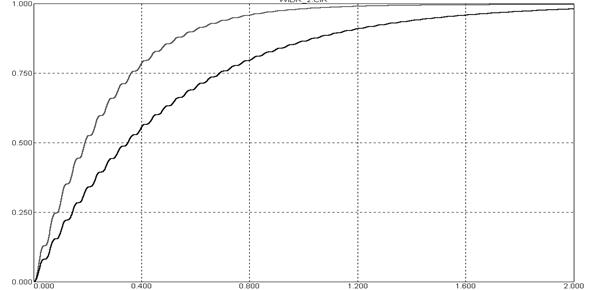
Рисунок 5.51 – Нормированные кривые настройки весовых коэффициентов компенсатора: а – для традиционной схемы; б – для модифицированной схемы.
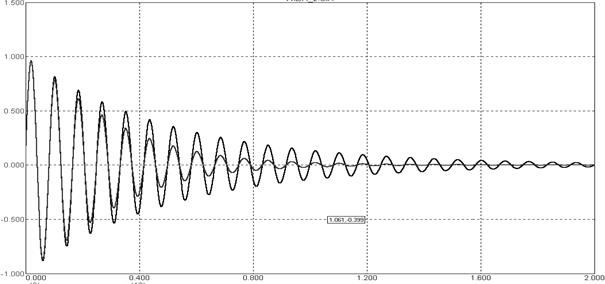
Рисунок 5.52 – Временные характеристики сигнала ошибки на выходе компенсатора: а – для традиционной схемы; б – для модифицированной схемы.
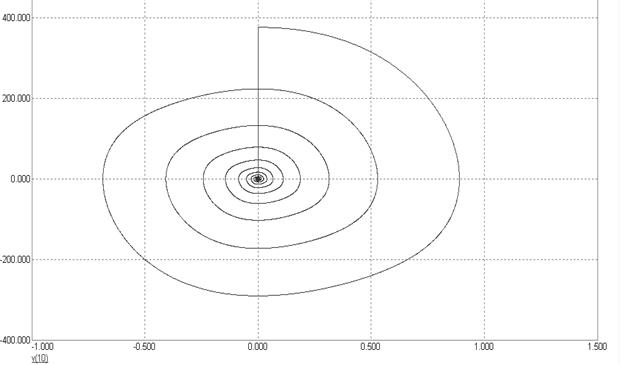
Рисунок 5.53 – Фазовая траектория традиционной схемы адаптивного компенсатора помех
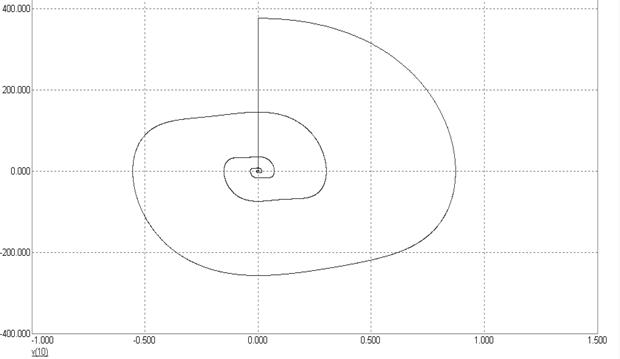
Рисунок 5.54 – Фазовая траектория модифицированной схемы компенсатора с дополнительным весовым коэффициентом в основном канале Приведенные примеры дают далеко не исчерпывающую картину применения программы МС9 для исследования сложных устройств или систем, теоретический анализ которых чрезвычайно труден из-за используемого математического аппарата. Показанный подход может быть чрезвычайно полезным и при проектировании различных устройств.
|