
Кинематический расчет рулевого привода
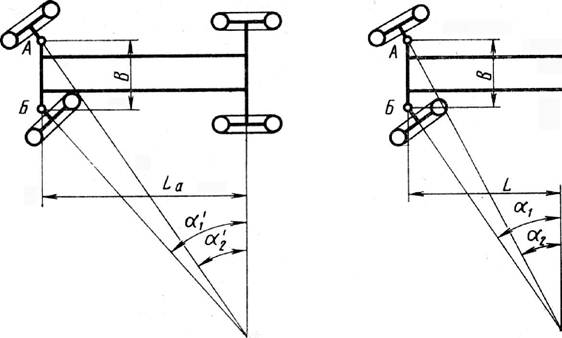
Рулевой привод, представляющий собой систему тяг и рычагов, служит для передачи усилия от сошки на поворотные цапфы и осуществления заданной зависимости между углами поворота управляемых колес. Часть рулевого привода, обеспечивающую эту зависимость, называют рулевой трапецией. Основной задачей кинематического расчета является определение оптимальных параметров рулевой трапеции. На стадии проектирования считают, что оси шкворней вертикальны. Чтобы на повороте движение автомобиля не сопровождалось боковым скольжением его колес, траектории качения всех колес должны иметь единый мгновенный центр 0 (рис. 8.2, а). Для этого необходимо соблюдать условие ctga' - ctga2 = B / L, (8.2)
где В - шкворневая колея, L - база автомобиля.
Выражению (8.2) удовлетворяет с достаточной для практики точностью применение рулевой трапеции, которая позволяет обеспечить такое соотношение между углами а и а2 поворота управляемых колес, при котором точка 0 пересечения их осей отстоит от линии АБ на расстоянии L < La (рис. 8.2, б). Чем ближе к единице отношение L/La = Я, тем совершеннее поворот автомобиля. Из треугольника ОАБ OA = B sin a /sin (a -a2), L = B sin a1 sin a2 / sin(a -a2), (8.3) Я = B/Lsina sina 2 /sin(a -a2). Параметрами рулевой трапеции являются шкворневая колея В (рис.8.3), расстояние n между центрами шаровых шарниров рычагов трапеции; длина m и угол © наклона рычагов поворотных цапф. Их определяют в такой последовательности. Рис. 8.3.Схема рулевой трапеции По чертежу управляемого моста находят размеры шкворневой колеи В. Затем для трех значений отношения m/n = у по графику определяют значения коэффициента х. Угол наклона рычагов 0 = arctg[ xL /(0, 5B)], n = B /(1 - 2 y cos 0), m = yn. Компоновочные условия обуславливают размещение рулевой трапеции перед управляемым мостом. В этом случае длина n поперечной тяги больше шкворневой базы, т. е. n = B /(1 + 2y cos 0). Для ряда последовательных значений угла, графически следует определить соответствующие им значения угла а1, а по формуле (8.3) - значения Я. Затем на одном графике для трех рассматриваемых вариантов надо построить кривые зависимости Я от а1 и прямую Я = 1. При дальнейшем рассмотрении принимаем те значения параметров рулевой трапеции, которые при наиболее употребительных значениях углов поворота колес соответствуют зависимости Я(а1), близкой к прямой Я = 1. При использовании высокоэластичных шин форма трапеции приближается к прямоугольнику. Для нормальной работы рулевого привода максимальные значения углов а1 и а 2 ограничиваются обычно усёовием G^max +a2max ^ 70°. Схематическую компоновку рулевого привода выполняют для определения размеров и расположения в пространстве сошки, тяг и рычагов, а также передаточного числа привода. При этом стремятся обеспечить одновременно симметричность крайних положений сошки относительно ее нейтрального положения, а также равенство кинематических передаточных чисел привода при повороте колес как вправо, так и влево. Если углы между сошкой и продольной тягой, а также между тягой и поворотным рычагом в его крайних положениях приблизительно одинаковы, то эти условия выполняются. Тяги выполняют из бесшовных труб и этим достигают необходимой жесткости при малой массе. Тягам придают формы, отвечающие компоновочным требованиям; их изготовливают из сталей 20, 30 или 35. Рычаги и сошку изготовливают коваными с переменным по длине эллиптическим сечением, что является наиболее рациональным с точки зрения прочности и жесткости. Материал - стали 35Х, 40, 40Х и 40ХН. Сошку сопрягают с валом шлицевым соединением треугольного профиля. Для беззазорной посадки отверстие в сошке и конец вала выполняют коническими, а для правильной установки сошки на валу на них предусмотрены соответствующие метки или несимметрично расположенные несколько шлицев.
|
 о
а)
Рис. 8.2. Схема поворота автомобиля без учета боковой эластичности шин: а - при идеальном соотношении между углами а и а2 поворота управляемых колес; б - при соотношении между углами а и a2, обусловленном применением рулевой трапеции
о
а)
Рис. 8.2. Схема поворота автомобиля без учета боковой эластичности шин: а - при идеальном соотношении между углами а и а2 поворота управляемых колес; б - при соотношении между углами а и a2, обусловленном применением рулевой трапеции



