Динамическое торможение асинхронного двигателя
двигателя в тормозных режимах
Динамическое торможение осуществляется обычно включением обмотки статора на сеть постоянного тока, обмотка ротора при этом замыкается на внешнее сопротивление.
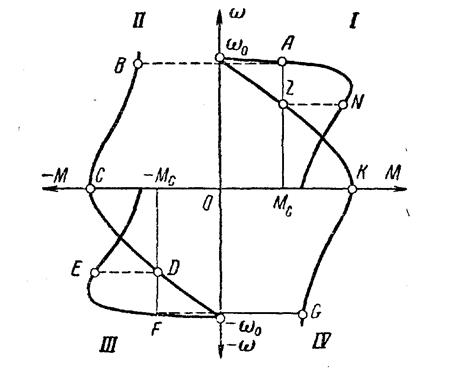
Рис. 6.2. Механические характеристики асинхронного двигателя при переключении двух фаз статора.
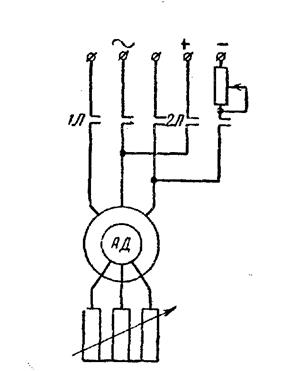
Рис. 6.3. Схема включения асинхронного двигателя для перехода на режим динамического торможения.
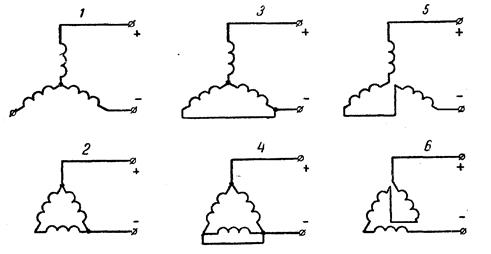
Для перехода из двигательного режима в режим динамического торможения контактор Q1 (рис. 6.3) отключает статор от сети переменного тока, а контактор Q2 присоединяет обмотку статора к сети постоянного тока. Для ограничения тока и получения различных тормозных характеристик в цепи ротора предусмотрено внешнее сопротивление. Проходя по обмотке статора, постоянный ток образует неподвижное поле, основная волна которого дает синусоидальное распределение индукции. Во вращающемся роторе возникает переменный ток, создающий свое поле, которое также неподвижно относительно статора. В результате взаимодействия суммарного магнитного потока с током ротора возникает тормозной момент, величина которого зависит от н. с. статора, сопротивления ротора и скорости двигателя. Механические характеристики для этого режима приведены в нижней части квадранта II (рис. 6.1). Они проходят через начало координат, так как при скорости, равной нулю, тормозной момент в этом режиме также равен нулю. Величина критического момента пропорциональна квадрату приложенного к статору напряжения и возрастает с ростом напряжения. На рис. 6.4 представлены различные способы включения обмоток статора при питании их от источника постоянного тока.
Рис. 6.4. Схемы включения обмоток статора при динамическом торможении.
|