Систем программного управления
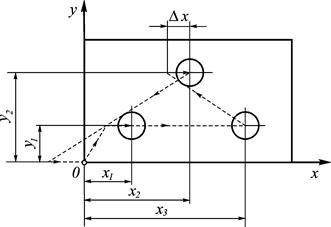
Системы числового программного управления, применяющиеся в отечественном машиностроении можно классифицировать по различным признакам. По технологическому назначению и функциональным возможностям системы ЧПУ можно подразделить на следующие группы: - позиционные, в которых рабочие органы могут перемещаться в заданные точки, а траектория перемещения от точки до точки задается только прямолинейным движением (рис. 25). Позиционные
Рис. 25. Схема позиционного управления при сверлении
устройства ЧПУ составляют группу устройств, имеющих один общий признак – позиционирование, т.е. обеспечение точности останова перемещаемых рабочих органов в точке с заданными координатами. Скорость перемещения в позиционных устройствах не программируется и обусловлена только динамикой приводов станка. Позиционными устройствами ЧПУ оснащают сверлильные, координатно-расточные, токарные, фрезерные, шлифовальные и другие станки, работающие по прямоугольному циклу; - контурные прямоугольные (коллинеарные) – устройства, которые обеспечивают движение по одной координате. Так как в большинстве станков применяют прямоугольную систему координат, такие устройства получили название прямоугольных (рис. 26). В этих устройствах, так же, как и в позиционных, программируются конечные координаты перемещения, однако в УП задается скорость движения рабочего органа в соответствии с заданным режимом резания, и перемещение выполняется поочередно по каждой из координатных осей. Прямоугольные устройства ЧПУ применяют в станках фрезерной, токарной и шлифовальной групп;
Рис. 26. Схема контурного прямоугольного управления при точении
- контурные (непрерывные) – устройства, обеспечивающие перемещение рабочих органов из данной точки пространства по траектории, форма и конечные координаты которой заданы в УП (рис. 27). Как правило, такие системы имеют встроенные линейные или линейно-круговые интерполяторы, которые работают по приращениям от точки к точке (рис. 28) [2]. Контурными устройствами ЧПУ оснащают станки фрезерной и токарной групп, осуществляющих формообразование деталей сложной формы;
Рис. 27. Схема контурного непрерывного управления при фрезеровании
а б Рис. 28. Виды интерполяции: а - линейно-круговая; б - линейная - универсальные (комбинированные), которые обладают особенностями как позиционных, так и контурных систем и наиболее типичны для многоцелевых станков. По принципу управления (числу потоков информации) системы ЧПУ делятся на группы: с разомкнутым контуром – устройство ЧПУ, в котором имеется только один поток информации. В таких системах отсутствуют измерительные устройства (датчики обратной связи), контролирующие перемещение рабочих органов. Точность воспроизведения движения рабочих органов с такой системой невысока и определяется точностью отработки команд двигателем привода подач и точностью кинематической цепи, передающей движение рабочему органу; с замкнутым контуром – устройство ЧПУ, в котором существуют два потока информации: один вводится в устройство управления через вводное устройство от программоносителя, а другой – в устройство ЧПУ от датчиков обратной связи, определяющих действительное положение рабочих органов. При наличии рассогласования между этими потоками устройство управления воздействует на приводы подач, последние перемещают рабочие органы в нужном направлении, изменяя рассогласование до величины, близкой к нулю. Различают устройства ЧПУ с постоянной (класс NC) и переменной (класс CNC) структурой. Устройство ЧПУ класса NC основано на принципе вычислительного устройства, где все операции, составляющие алгоритм работы, выполняются параллельно с помощью отдельных цепей или устройств, реализующих ту или иную функцию (агрегатно-блочное построение). Эти устройства называют также устройствами ЧПУ с жесткой структурой. Базовые модели таких устройств (Н22 и НЗЗ) содержат микроэлектронику и при их использовании вмешательство оператора в процесс обработки весьма ограничено. Устройство ЧПУ класса CNC (с переменной структурой) соответствует структуре управляющей ЭВМ, включающей в себя вычислительное устройство (процессор), блоки памяти и блоки ввода-вывода информации. При этом объем функций, характер проводимых операций и их последовательность определяются программами функционирования, которые введены в блок памяти. Устройства класса CNC расширяют функциональные возможности программного управления. При этом появляются функции, которые раньше не могли быть реализованы: хранение УП и ее редактирование на рабочем месте (оперативное управление), расширение возможности индикации на дисплее, диалоговое общение с оператором, широкие возможности коррекции (адаптивное управление), в том числе и погрешностей станка, система диагностики неисправностей, возможность изменения программным способом функций системы управления при ее эксплуатации, реализация функций электроавтоматики и др. В зависимости от конфигурации системы управления обозначения металлорежущих станков могут быть следующие: Ф1 – станки с цифровой индикацией, в том числе с предварительным набором координат; Ф2 – станки с позиционными прямоугольными системами управления координат; ФЗ – станки с контурными прямолинейными и криволинейными системами управления координат; Ф4 – станки с универсальными системами управления координат для позиционно-контурной обработки.
|