Электр жетегінің қысқаша тарихы.
Электр жетегінің дамуы XIX ғасырдың бірінші жартысында жұмыс істеуге қабілетті электр қозғалтқыштардың үлгілерін жасаумен басталды. Электр жетегіне тəн элементтермен: механикалық беріліс, басқару бөліктері жəне с.с. жабдықталған тұрақты ток электр қозғалтқышын іс жүзінде пайдалану 1834-1838 ж. басталды. Онда Нева өзенінің ағысына қарсы қайықтың жүзуі іске асырылды жəне бұл жұмыс академик Б.С. Якоби атымен байланысты болды. Жұмыс əлемдік белгілік алды, бірақ сол кездегі техникалық құралдардың, ең бастысы қоректену көзі- 13 гальваникалық батарея жетілмегендігінен жарқын өнертапқыш Б.С. Якоби жəне оның ізбасарларының жұмыстары кең практикалық қолдану таба алмады. Тек XIX ғасырдың 70 жылдары ғана, практика жүзінде қолдануға болатын тұрақты ток қозғалтқыштары əзірленіп Вена, Париж, Мюнхен көрмелерінде көрсетілді. XIX ғасырдың соңы XX ғасырдың басы электр станцияларын салумен, электр желілерінің дамуымен сипатталады. Электр энергиясын орталықтан өндіру жəне бөліп тарату өндірістік электр жетегін жасаудың негізін қалады. Бұрынғы пайдаланып жүрген айыл, арқан көмегімен энергияны механикалық жолмен бөліп тарататын бу немесе су қозғалтқыштары бар топтық жетек орнына топтық электр жетегі келді. Ол жабдықтардың жалпы жайғасуын өзгертпей-ақ əрбір фабрикадағы жеке жылу станциясының, бу қазандарының немесе су доңғалақты гидростанциясының болуын керексіз етіп, орталықтандырылған электр жабдықтауға - электр желілеріне негізделді. Осылай, электр жетегі механикалық жетектің барлық түрін ығыстырып шығарды. Мысал үшін, электр қозғалтқыштардың қуаты жалпы орнатылған қозғалтқыштардың қуатының 1890 жылы 5 % құраса, 1927ж. - 75%, 1950 ж. - 100% жетті. Жаңа салынған кəсіпорындарда электр жетегінің көптеген əр түрлері пайдаланыла бастады. Аздау жəне орта қуатты реттелмейтін электр жетектерінде қысқа тұйықталған роторлы асинхронды қозғалтқыштар, ал үлкен қуатты электр жетегінде синхронды қозғалтқыштар орын алды. Реттелетін электр жетегі əр- түрлі болып қалыптасты: реостаттық реттегенде немесе магнит өрісін əлсіреткенде қоздыру сұлбалары əр түрлі: тəуелсіз, параллель, тізбектей, аралас тұрақты ток қозғалтқыштары кеңінен пайдаланылды, сондай-ақ фазалы роторлы асинхронды қозғалтқыштар, айнымалы токтың коллекторлық қозғалтқыштары қолданыс тапты. Басқа да дəстүрлі емес электр машиналарымен қатар реттелетін электр жетегінің жаңа түрі – вентилдік индукторлық жетектер қарқынды игеріліп келеді. Өте кішкентай роботтардың микрожетектерінде жұқа қабықшалы диэлектриктік қозғалтқыштар қолданылуда. Соңғы жылдары əлемде реттелмейтін электр жетегінен реттелетін электр жетегіне көшу үрдісі қалыптасып дамып келеді. Реттелетін электр жетегін сораптарда, желдеткіштерде, конвейерлерде жəне т.б. жаппай қолдану жабдықтарының технологиялық деңгейін күрт көтеріп, қомақты энергетикалық ресурстарды үнемдеуге мүмкіндік ашты.
1.2. Электрлік жетек механикасының негізгі теңдеулері Электрлік жетектің жұмысы кезінде электрлік қозғалтқыштың айналдырушы моменті біліктегі барлық кедергі моментті жеңіп жұмысшы машинаны қозғалысқа келтіреді немесе жұмысшы машинаны тежеп, оның айналу жылдамдығын өзгертеді яки тоқтатады. Жалпы алғанда, электрлік жетектің қозғалыс жылдамдығы үнемі өзгеріп отырады. Бұл қозғалтқышты жүргізіп жіберу мен тежеуден, жүкке байланысты кедергі күштің өзгеруінен, қорек көзіндегі кернеудің өзгеруінен т.б. себептерден туындайды. Ал жылдамдықтың өзгеруінің салдарынан жетектің барлық құрылымындағы қозғалыстағы бөлшектердің кинетикалық энергиясы өзгереді. Жетек жүйесіндегі қозалыстың сипаты қозғалтқыштың айналдырушы моменті мен кедергі моменттің ара қатынасына байланысты анықталады. Егер айналдырушы момент пен кедергі момент өзара тең болса, онда қозғалыс тұрақты қалыптасқан жылдамдыққа ие болады. Егер айналдырушы момент кедергі моменттен артық болса, онда қозғалыс жылдамдығы өседі және керісінше. Осыған байланысты жетек бөліктерінің энергиясы да тұрақты болып немесе өсіп не кеміп отырады. Қозғалтқыштың тудыратын энергиясы dW барлық кедергілерді жеңуге dWK және қозғалыстағы бөлшектерге кинетикалық энергия беруге dWД жұмсалады, яғни
Айналып тұрған белшектердің кинетикалық энергиясы
мұндағы: J- айналып тұрған бөлшектердің кинетикалық энергиясы; Ендеше энергия балансының теңдеуін төмендегіше жазуға болады:
Егер энергияның уақыт бойынша өзгерісін анықтаса, онда қуаттар балансының теңдеуі алынады:
немесе
мұндағы: қозғалтқыштың куаты
Айналып тұрған бөлшектердің кинетикалық энергиясы тудыратын қуатты динамикалық қуат, ал моментті динамикалық момент деп атайды. Айналдырушы момент пен қуаттың арасындағы байланыс
өрнегімен анықталатыны белгілі. Егер бұрыштық жылдамдықтың орнына айн/мин-пен өлшенген айналу жылдамдығының мәнін қойса (
өрнегін алуға болады. Егер (13.5) өрнегін бұрыштық жылдамдыққа бөлсе, онда моменттер балансының теңдеуі шығады:
немесе
мұндағы: М - қозғалтқыш тудыратын момент; Мк - кедергі момент; М д- динамикалық момент. Көптеген жағдайда инерциялық момент тұрақты деп алынатындықтан, яғни J = const, моменттер балансының теңдеуі, әдетте, төмендегіше жазылады:
Міне осы теңдеу электрлік жетек механикасының негізгі теңдеуі деп аталады. Электрлік жетек механикасының негізгі теңдеуі бойынша: егер жылдамдық тұрақты болса яғни d
Бұл тендеу жылдамдық өскен кезде айналмалы белшектердің энергия жинақтайтынын, ал жылдамдық азайған кезде жинақталған энергияның қайтадан жүйеге берілетіндігін көрсетеді. Жалпы алғанда, жылдамдық өзгерген кезде жетектің кедергі моменті де өзгеріп отырады. Сондықтан әртүрлі жұмысшы машиналар үшін олардың механикалық сипаттамаларына (13.2-сурет) сәйкес келетін кедергі моменттің тәжірибе арқылы алынған өрнегі ұсынылған:
мұндағы: Мс - жұмысшы машинаның (жетектің деп айтуға да болады) статикалық кедергі моменті; Мн - жұмысшы машинаның номинал жылдамдықпен айналғандағы кедергі моменті; п - айналу жылдамдығы; п- жұмысшы машинаның номинал айналу жылдамдық х- жұмысшы машинаның механикалық сипаттамасына сәйкесті дәреже көрсеткіші. 2-суреттегі 1 сипаттама жүгі тұрақты болып келетін көтергіш машиналарға, транспортерлерге, конвейерлерге сәйкес келеді. Мұндай сипаттама үшін х=0 деп алынады. Жылдамдық өскен кезде кедергі моменті одан сызықты тәуелді өсетін жұмысшы машиналар үшін х=1 (2 сипаттама). Кедергі моменті жылдамдықтың квадратынан тәуелді жұмысшы машиналардың механикалық сипаттамасын (3 сипаттама) желдеткіштік сипаттама деп атайды. Мұндай жұмысшы машиналар (желдеткіштер, центрден тепкіш сорғылар) үшін х=2. Кедергі моменті жылдамдықтың кері шамасынан тәуелді (4 сипаттама) жұмысшы машиналар (метал өңдеу станоктары) үшін х=-1.
2-сурет. Жұмысшы машиналардың механикалық сипаттамалары.
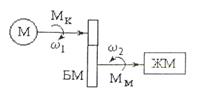
Әдетте жұмысшы машиналардың айналу жылдамдығы электрлік қозғалтқыштардың айналу жылдамдығынан әлдеқайда кем болады Өйткені электрлік қозғалтқыштардың айналу жылдамдығы жоғарылаған сайын массасы азаяды, габариттік мөлшері кішірейеді және бағасы төмендейді, пайдалы әрекет коэффициенті мен қуат коэффициенті жоғарылайды. Осы себепті қозғалтқыштардын номинал айналу жылдамдығын көбіне 750, 1000, 1500, 3000 айн/мин-қа тең етіп жасайды. Сондықтан қозғалтқыш пен жұмысшы машинаны жылдамдықты азайтатын беріліс механизмі арқылы қосады (3-сурет). Жетек жүйесінде бірнеше элемент әртүрлі жылдамдықпен айналып (қозғалып) тұрады. Ал моменттер байансының теңдеуі (13.10) бір буынды, яғни қозғалтқыш жұмысшы
3-сурет. Сатылы берілісті жетектің сұлбалық құрылысы.
машинамен тікелей жалғасқан, жетек үшін жазылған. Көп буынды жетектегі моменттер балансының теңдеуін шешу үшін жетекте қанша буын болса, сонша теңдеу жазу керек. Бұл есепті қиындатады. Сондықтан есептің шешуін оңайлату үшін барлық инерциялық моменттерді, кедергі моменттер мен айналдырушы моменттер бір жылдамдыққа келтіріліп, бір теңдеу құрылады. Элементтердің (буындардың) жылдамдықтары әдетте қозғалтқыштың жылдамдығына келтіріледі.
|
 (13.1)
(13.1) (13.2)
(13.2) - бұрыштық жылдамдық.
- бұрыштық жылдамдық. (13.3)
(13.3) (13.4)
(13.4) (13.5)
(13.5) кедергі қуат
кедергі қуат динамикалық қуат
динамикалық қуат
 (13.6)
(13.6) ), онда жиі қолданылатын
), онда жиі қолданылатын (13.7)
(13.7) (13.8)
(13.8) (13.9)
(13.9) (13.10)
(13.10) (13.11)
(13.11) (13.12)
(13.12)