
Задание на индивидуальную работу
Выполнил студент
группы 922402
Качанов А. С.
Приняла
Дехтяренко В. К.
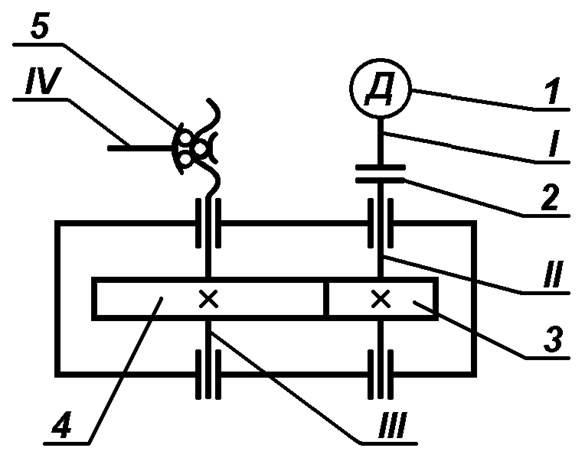
Механизм качания руки робота с зубчатой передачей.
1 – электродвигатель 2 – соединительная муфта 3,4 – зубчатая передача 5 – шариковинтовая передача I – вал электродвигателя II – входной вал-винт редуктора III – выходной вал редуктора IV – палец для соединения с рукой робота
Исходные данные Мощность Р=7 Вт, снимаемая с выходного вала III. Скорость n=550 об/мин. Срок службы L=18000 ч. Тип зубчатой передачи: косозубая. Производство серийное.
1. Описание работы механизма................................... 4 2. Предварительный выбор двигателя............................ 5 2.1. Расчет требуемой мощности двигателя......................... 5 2.2. Выбор двигателя............................................. 5 3. Расчет редуктора............................................ 6 3.1. Кинематический расчет...................................... 6 3.2. Расчет геометрических размеров.............................. 6 3.3. Расчет шариковинтовой передачи.............................. 7 4. Проверочный расчет требуемой мощности двигателя............. 9 5. Предварительный расчет валов............................... 11 6. Расчет момента инерции редуктора............................. 12 7. Расчет мертвого хода........................................ 13 8. Подбор и расчет подшипников выходного вала................... 14 9. Основание выбора применяемых материалов и типа смазки........ 15 Литература........................................................ 16
Механизм качания предназначен для изменения положения плеча робота. Он состоит из трёх основных составляющих: а) электродвигатель; б) редуктор; в) палец соединённый с рукой робота. В качестве источника энергии использован электродвигатель ДКМ-25-12. Соединение вала электродвигателя с валом редуктора осуществляется с помощью соединительной муфты. Соединительная муфта крепится на входном валу редуктора. Редуктор представляет собой двухступенчатую косозубую цилиндрическую передачу, работающую на замедление вращения. Редуктор состоит из: а) входного вала I; б) выходного вал-винта II; в) двух ведомых колёс 3 и 4. Вал и выходной вал-винт установлены на подшипники скольжения. 2. Предварительный выбор двигателя. 2.1. Расчет требуемой мощности двигателя.
|
 Задание №3. Вариант 13.
Задание №3. Вариант 13.


