Вход и выход технологических процессов
Важными для управления являются измерения и технология датчиков. Датчики должны точно отображать физические переменные технического процесса как в стационарных, так и в переходных режимах работы.
4.2.1. Компоненты интерфейса между процессом и управляющим компьютером 4.2.1.1 Датчики У большинства физических величин существует множество различных измерительных технологий, характеризуемых зависимостью между вырабатываемым сигналом и измеряемой величиной. Измерительное устройство или датчик (sensor) состоит из двух частей — измерительной головки (sensor head) и преобразователя (transducer), как показано на рис. 4.8. Термин "датчик" иногда ошибочно употребляется вместо "измерительной головки".
Рисунок 4.8 - Составные элементы датчика
Результат измерения — это "реакция измерительной головки датчика", которая на выходе преобразователя представляет собой электрическую величину, распространяющуюся дальше по проводнику. В соответствии с ГОСТ 16263-70 это устройство называется первичным измерительным преобразователем (primary measuring transducer), его часть, на которую непосредственно воздействует измеряемая величина, — чувствительным элементом (detector), а все последующие составляющие измерительной цепи - измерительным преобразователем. В большинстве управляющих систем выходной сигнал обычно (и предпочтительно!) электрический, однако довольно часто встречаются и пневматические датчики. Главное достоинство электрических датчиков — это гибкость и разнообразие способов обработки сигнала. Следует отметить, что электрический сигнал можно передавать на большие расстояния с очень малыми затратами энергии. Пневматические датчики, по сравнению с электрическими, обычно дешевле, меньше по размерам, проще и нечувствительны к возмущениям. Более того, в условиях взрыво- и пожароопасной среды пневматические датчики более безопасны, чем электрические. Различают три класса датчиков: - аналоговые датчики, т. е. датчики, вырабатывающие аналоговый сигнал; - цифровые датчики, генерирующие последовательность импульсов или двоичное слово; - бинарные (двоичные) датчики, которые вырабатывают сигнал только двух уровней: "включено/выключено" (иначе говоря, 0 или 1).
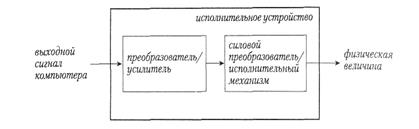
4.2.1.2. Исполнительные устройства (механизмы) Исполнительное устройство или механизм (actuator) преобразует электрическую энергию в механическую или в физическую величину для воздействия на управляемый процесс. Электродвигатели, управляющие "суставами" промышленного робота, и есть исполнительные механизмы. В технологических процессах металлургической, химической, пищевой и др. отраслях оконечными управляющими элементами могут быть клапаны, задвижки, задающие расход реагентов. Следует подчеркнуть, что исполнительные устройства обычно лишь опосредованно влияют на переменные физических процессов, измеряемые датчиками. Например, датчики измеряют температуру, координаты или химическую концентрацию, а исполнительные устройства управляют подводом тепла, движением или потоками исходных реагентов. И уже от динамики физической системы зависит, как измеряемые величины изменятся из-за управляющих воздействий исполнительных устройств. В составе исполнительного устройства можно выделить две части (рис. 4.9): во-первых, преобразователь (transducer) и/или усилитель (amplifier), во-вторых, силовой преобразователь (converter) и/или исполнительный механизм (actuator). Исполнительный механизм превращает входной сигнал в механическую или физическую величину, Например электромотор преобразует электрическую энергию во вращательное движение. Усилитель изменяет маломощный управляющий сигнал, получаемый от выходного интерфейса компьютера, до значения, способного привести в действие преобразователь. В некоторых случаях усилитель и преобразователь конструктивно составляют одно целое. Таким образом, некоторые оконечные управляющие элементы могут представлять собой самостоятельную систему управления — выходной сигнал компьютера является опорным значением для оконечного управляющего элемента.
Рисунок 4.9 - Составные элементы исполнительного устройства
Требования к исполнительным устройствам — потребляемая мощность, разрешающая способность, повторяемость результата, рабочий диапазон и т. д. — могут существенно различаться в зависимости от конкретного приложения. Для успешного управления процессом правильно выбрать исполнительные устройства так же важно, как и датчики. Для перемещения клапанов часто применяется сжатый воздух. Если необходимо развивать значительные усилия, обычно используют гидропривод. Электрический сигнал компьютера должен быть преобразован в давление или расход воздуха либо масла. Бинарное управление обеспечивается электромеханическими реле или электронными переключателями.
4.2.1.3. Полоса пропускания и шум Два важных фактора — ширина полосы пропускания и уровень шума — определяют способ передачи сигналов между компьютером и физическим процессом. Полоса пропускания (bandwidth) является важным параметром для многих технических приложений — передача данных, системные шины, управление с обратной связью, — однако в разных случаях термин имеет различные значения. В передаче информации и управлении с обратной связью полоса пропускания обозначает диапазон частот, в пределах которого амплитудно-частотная характеристика остается не меньше заданного значения (обычно 0.707 от максимального). Для системных шин полоса пропускания является синонимом термина "пропускная способность". При обработке сигналов управления и мониторинга полоса пропускания определяется как диапазон рабочих частот датчика или исполнительного механизма — только те физические величины, рабочие частоты которых лежат в полосе пропускания, можно надлежащим образом измерить или изменить. Это означает, что скорость реакции датчика достаточна для правильного отображения изменений исходной физической величины, при этом сигнал не искажается из-за несоответствия динамики датчика и процесса. Аналогично, исполнительный механизм должен иметь соответствующую полосу пропускания, чтобы реализовать нужное управляющее воздействие. Чем шире полоса пропускания, тем быстрее будет реакция датчика или исполнительного механизма. Последнее не всегда является положительным фактором, поскольку в этом случае устройство более восприимчиво к нежелательным высокочастотным возмущениям. Любой измерительный сигнал искажается возмущениями ( disturbances) и шумом (noise) как в процессе формирования, так и передачи. Одна из основных проблем передачи сигнала — уменьшение влияния шума. Источники шума должны быть изолированы, или, в крайнем случае, их влияние должно быть снижено до минимально возможного уровня. Искажение сигналов или сообщений шумом проявляется при любых типах передачи информации. Регуляторы обычно проектируются в расчете на наличие возмущений и шумов.
4.2.1.4. Передача измерительных сигналов Аналоговые сигналы, вырабатываемые измерительными устройствами, обычно необходимо так или иначе преобразовать прежде, чем ввести их в компьютер. Сигнал в виде напряжения должен быть усилен так, чтобы соответствовать диапазону напряжений интерфейса компьютера. Более того, иногда уровень напряжения датчика должен быть смещен, чтобы привести в соответствие минимальный уровень выхода датчика с минимальным напряжением интерфейса компьютера. Эта процедура называется согласованием сигнала. При передаче аналоговых сигналов существуют специфические проблемы, обусловленные электрическими возмущениями. Сигнал, передаваемый от датчика по электрическому проводнику, может подвергнуться зашумлению под влиянием среды из-за нежелательных связей резистивного, индуктивного или емкостного характера. Этот шум может исказить исходный сигнал. Одно из возможных решений – преобразовать аналоговый измерительный сигнал в последовательность импульсов, частота или продолжительность (ширина) которых известным образом связана с уровнем исходного сигнала, а затем передавать этот преобразованный измерительный сигнал. Такой переход особенно полезен, когда внешний шум имеет ту же частоту, что и исходный сигнал. Последовательность импульсов может передаваться либо по электрическому, либо по волоконно-оптическому кабелю. 4.2.1.5 Характеристики датчиков Датчик должен воспроизводить физическую величину максимально быстро и точно. Хотя чаще всего датчик выбирают исходя из надежности и удобства обслуживания, его точность, стабильность и повторяемость результатов остаются важнейшими факторами. Основой работы управляющего компьютера является входная информация, поэтому точные и надежные измерения — это необходимое условие качества управления. Большая часть характеристик датчика, которые приводятся в техническом описании, — статические параметры. Эти параметры не показывают, насколько быстро и точно датчик может измерить сигнал, изменяющийся с большой скоростью. Свойства, отражающие работу датчика в условиях изменяющихся входных воздействий, называются динамическими характеристиками (dynamic characteristic). Они существенно влияют на работу системы управления. Идеальный датчик мгновенно реагирует на изменение измеряемой физической величины. На практике любому датчику необходимо некоторое время на отработку нового входного сигнала. Очевидно, что для адекватного отображения реальных изменений наблюдаемой величины время реакции датчика должно быть как можно меньше. Это тот же самый принцип, который применяется ко всей системе управления (компьютеру) процессом реального времени в целом: временные характеристики физического процесса определяют быстродействие системы (производительность компьютера). Однако чаще требуется компромисс между скоростью реакции датчика и его чувствительностью к шуму. Точность ( accuracy) определяет разницу между измеренной и действительной величиной; она может быть отнесена к датчику в целом или к конкретному его показанию. Разрешение (resolution) — это наименьшее отклонение измеряемой величины, которое может быть зафиксировано и отражено датчиком. Разрешение намного чаще, чем точность, указывается в технических описаниях. Точность датчика зависит не только от его аппаратной части, но и от остальных элементов измерительного комплекса. Погрешность (ошибка) измерения (measurement error) определяется как разница между измеренной и действительной величинами. Поскольку действительная величина неизвестна, в произвольном случае оценку точности можно сделать на основе эталонных измерений или углубленного анализа данных. Ошибки измерения можно классифицировать и, соответственно, моделировать как детерминированные (или систематические) и случайные (или стохастические). Детерминированные ошибки связаны с неисправностью датчика, нарушением условий его применения или процедуры измерений. Эти ошибки повторяются при каждом измерении. Типичная систематическая ошибка — это смещение показаний (reading offset) или сдвиг (bias). В принципе, систематические ошибки устраняются при поверках (calibration). Случайные ошибки, напротив, могут иметь самое разное происхождение. В большинстве случаев — это влияние окружающей среды (температуры, влажности, электрических наводок и т. п.). Если причины случайных ошибок известны, то эти ошибки можно компенсировать. Часто влияние возмущений характеризуют количественно такими параметрами, как средняя ошибка (mean error), среднеквадратичная ошибка (mean quadratic error) или стандартное отклонение (standard deviation) и разброс (variance) либо погрешность ([un]precision). В английском языке в слова "accuracy" и "precision", которые на русский язык переводятся одним и тем же словом "точность", вкладываются несколько разные понятия. "Accuracy" соответствует общему отсутствию погрешностей измерения, в то время как "precision" определяет малый разброс результатов измерений относительно некоторого среднего значения, которое может оказаться неточным из-за систематической погрешности, например смещения. Таким образом, необходимым и достаточным является удовлетворение требования, определяемого термином "accuracy". Датчик с хорошей повторяемостью результата (или малой случайной ошибкой) имеет, очевидно, хорошую случайную погрешность, но не обязательно дает правильную выходную величину, поскольку сдвиг может существенно исказить результат, т. е. точность датчика невелика. Разница между систематической и случайной ошибками иллюстрируется рис. 3.3. На рис. 3.3 а и в представлены смещенные результаты. Стандартное отклонение или разброс результатов отдельных измерений является мерой погрешности. Центр каждой мишени представляет собой истинное значение измеряемой величины, а точки — результат измерений. На диаграммах справа истинная величина представлена прямой линией, на которую наложены результаты измерений. Точность измерения зависит как от смещения, так и от разброса: а ~ большое смещение + большой разброс = низкая точность; б ~ малое смещение + большой разброс = низкая точность; в ~ большое смещение + малый разброс = низкая точность; г ~ малое смещение + малый разброс = высокая точность Результаты измерений на рис. 4.10 б и г имеют малую погрешность, только результат, показанный на рис. 3.3 г, является точным.
Рисунок 4.10 - Иллюстрация смещения, погрешности и точности
4.2.1.6 Динамические характеристики датчиков Динамические свойства датчика характеризуются целым рядом параметров, которые, однако, довольно редко приводятся в технических описаниях производителей. Динамическую характеристику датчика можно экспериментально получить как реакцию на скачок измеряемой входной величины (рис. 4.11). Параметры, описывающие реакцию датчика, дают представление о его скорости (например, время нарастания, запаздывание, время достижения первого максимума), инерционных свойствах (относительное перерегулирование, время установления) и точности (смещение).
Рисунок 4.11 - Динамическая реакция датчика (реакция на скачок): (t0 — время прохождения зоны нечувствительности, Td — запаздывание, Тр — время достижения первого максимума, Ts — время установления, Мp— перерегулирование) В принципе следует стремиться к минимизации следующих параметров. · Время прохождения зоны нечувствительности (dead time) — время между началом изменения физической величины и моментом реакции датчика, т. е. моментом начала изменения выходного сигнала. · Запаздывание (delay time) — время, через которое показания датчика первый раз достигают 50 % установившегося значения. В литературе встречаются и другие определения запаздывания. · Время нарастания (rise time) — время, за которое выходной сигнал увеличивается от 10 до 90 % установившегося значения. Другое определение времени нарастания — величина, обратная наклону кривой реакции датчика на скачок измеряемой величины в момент достижения 50 % от установившегося значения, умноженная на установившееся значение. Иногда используются другие определения. Малое время нарастания всегда указывает на быструю реакцию. · Время достижения первого максимума (peak time) — время достижения первого максимума выходного сигнала (перерегулирования). · Время переходного процесса, время установления (settling time) — время, начиная с которого отклонение выхода датчика от установившегося значения становится меньше заданной величины (например, ± 5 %). · Относительное перерегулирование (percentage overshoot) — разность между максимальным и установившимся значениями, отнесенная к установившемуся значению (в процентах). · Статическая ошибка (steady-state error) — отклонение выходной величины датчика от истинного значения или смещение. Может быть устранена калибровкой датчика. В реальных условиях некоторые требования к датчикам всегда противоречат друг яругу, поэтому все параметры нельзя минимизировать одновременно.
4.2.1.7 Статические характеристики датчиков Статические характеристики датчика показывают, насколько корректно выход датчика отражает измеряемую величину спустя некоторое время после ее изменения, когда выходной сигнал установился на новое значение. Важными статическими параметрами являются: чувствительность, разрешающая способность или разрешение, линейность, дрейф нуля и полный дрейф, рабочий диапазон, повторяемость и воспроизводимость результата. - Чувствительность (sensitivity) датчика определяется как отношение величины выходного сигнала к единичной входной величине (для тонких измерительных технологий определение чувствительности может быть более сложным). - Разрешение (resolution) — это наименьшее изменение измеряемой величины, которое может быть зафиксировано и точно показано датчиком. - Линейность (linearity) не описывается аналитически, а определяется исходя из градуировочной кривой датчика. Статическая градуировочная кривая показывает зависимость выходного сигнала от входного при стационарных условиях. Близость этой кривой к прямой линии и определяет степень линейности. Максимальное отклонение от линейной зависимости выражается в процентах. - Статическое усиление (static gain) или усиление по постоянному току (d.c. gain) — это коэффициент усиления датчика на очень низких частотах. Большой коэффициент усиления соответствует высокой чувствительности измерительного устройства. - Дрейф (drift) определяется как отклонение показаний датчика, когда измеряемая величина остается постоянной в течение длительного времени. Величина дрейфа может определяться при нулевом, максимальном или некотором промежуточном значении входного сигнала. При проверке дрейфа нуля измеряемая величина поддерживается на нулевом уровне или уровне, который соответствует нулевому выходному сигналу, а проверка дрейфа на максимуме выполняется при значении измеряемой величины, соответствующем верхнему пределу рабочего диапазона Датчика. Дрейф датчика вызывается нестабильностью усилителя, изменением окружающих условий (например, температуры, давления, влажности или уровня вибраций), параметров электроснабжения или самого датчика (старение, выработка ресурса, нелинейность и т. д.). - Рабочий диапазон (operating range) датчика определяется допустимыми верхним и нижним пределами значения входной величины или уровня выходного сигнала. - Повторяемость (repeatability) характеризуется как отклонение между несколькими последовательными измерениями при заданном значении измеряемой величины в одинаковых условиях, в частности приближение к заданному значению должно происходить всегда и либо как нарастание, либо как убывание. Измерения должны быть выполнены за такой промежуток времени, чтобы не проявлялось влияние дрейфа. Повторяемость обычно выражается в процентах от рабочего диапазона. - Воспроизводимость (reproducibility) аналогична повторяемости, но требует большего интервала между измерениями. Между проверками на воспроизводимость датчик должен использоваться по назначению и, более того, может быть подвергнут калибровке. Воспроизводимость задается в виде процентов от рабочего диапазона, отнесенных к единице времени (например, месяцу).
4.2.1.7 Влияние нелинейности Многие датчики обладают свойством нелинейности. Например, если датчик достигает верхнего предела рабочего диапазона, проявляется эффект насыщения, т. е. выходной сигнал ограничен, даже если входная величина возрастает. Примеры нелинейностей: нелинейная деформация пружин, кулоновское трение; магнитное насыщение в сердечниках трансформаторов, характеристики расходомеров (например, измерения в открытом канале характеризуются нелинейным соотношением между измеренным уровнем h и расходом F, так как F = К • ha, где К — постоянная);зависимость сопротивления термистора от температуры (R = R0 • еxp(b(1/T-1/To)) где Т— это температура в градусах Кельвина, a R0, T 0 и b — это постоянные). Особые проблемы связаны с люфтом в зубчатых передачах и других механизмах, имеющих свободный ход, а также с магнитным насыщением. Выходной сигнал датчиков, для которых характерны такие явления, — это многозначная функция входной величины, зависящая от направления её изменения. 4.2.1.8 Характеристики импедансов Объединение одного или нескольких элементов может существенно повлиять на поведение каждого из них по сравнению с автономным использованием. Например, тяжелый акселерометр может увеличить нагрузку настолько, что это изменит измеряемое ускорение и даст неверный результат. Аналогично, подключение вольтметра изменяет токи и напряжения в цепи, а термопара может исказить измеряемую температуру. Все это называется эффектом нагрузки (loading effect). Такие ошибки могут превосходить все другие типы ошибок измерения; их следует предусматривать при соединении различных датчиков и устройств передачи/преобразования информации. Понятие "импеданс" (impedance), т. е. полное сопротивление, имеет фундаментальное значение в электрических системах. Устройство с высоким входным импедансом (input impedance) потребляет меньший ток при заданном напряжении и, соответственно, меньшую мощность. Устройство с низким входным импедансом потребляет больший ток при данном напряжении. Поскольку оно отбирает большую мощность у предшествующего в цепи устройства, это может вызвать ошибки нагрузки. Напряжение, генерируемое устройством с высоким выходным импедансом (output impedance), чрезвычайно чувствительно к эффекту нагрузки. Напротив, низкий выходной импеданс позволяет уменьшить зависимость выходного напряжения от тока нагрузки. Для выходных сигналов в виде силы тока картина прямо противоположная: высокий выходной импеданс делает выходной сигнал менее подверженным влиянию токов нагрузки. Поэтому во многих случаях требуется применение специальных согласующих электронных устройств для усиления сигналов и приведения в соответствие импедансов. В случае сигналов в виде напряжений применяются усилители с высоким входным импедансом и низким выходным импедансом. Процедура называется согласованием импедансов (impedance matching) и должна тщательно выполняться на каждом этапе.
|