Бесконтактная аппаратура. Датчики
Бесконтактная аппаратура находит все более широкое применение в электрооборудовании металлургических цехов благодаря таким достоинствам, как высокая допустимая частота включений, долговечность, быстродействие, надежность, сравнительно малая чувствительность к влиянию окружающей среды, отсутствие потребности в регулировке и уходе в процессе эксплуатации, широкие возможности в отношении глубины автоматизации технологических процессов и т. п. В бесконтактных системах автоматического управления функции реле выполняют логические элементы, а функцию контакторов—бесконтактные переключающее (выходные) устройства. В качестве командоаппаратов используются бесконтактные аппараты, в основном сельсинного типа, типа вращающегося трансформатора и т. п. Для контроля различных физических величин используются разнообразные датчики: скорости, тока, э. д. с, температуры, положения и т. п. Датчики положения служат для контроля положения машины или ее отдельных элементов в пространстве и для ограничения их движения. В электроприводе металлургических машин и агрегатов широко используются путевые датчики, конечные выключатели. В качестве путевых, конечных выключателей используются в основном контактные аппараты механического, нажимного, рычажного, вращающегося действия. В бесконтактных системах управления в качестве датчиков положения и задающих (командных) устройств широко используются сельсинные командоаппараты в рычажном, маховичном и педальном исполнениях.
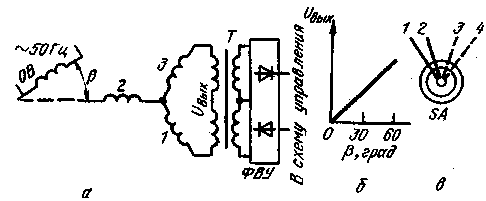
где β — угол сдвига фаз вторичной и первичной обмоток; Еmax— максимальное значение индуктируемой э. д. с. при совпадении оси данной обмотки (1или 3 ) с осью обмотки ОВ (рис. 5,б). Нулевое напряжение на выходе имеет место, когда ось первичной обмотки ОВ совпадет с осью вторичной фазовой обмотки 2. Изменением угла поворота ротора сельсина, можно изменять величину управляющего сигнала, подаваемого в схему управления электроприводом, и тем самым управлять работой двигателя (включать, отключать, изменять скорость и т.п.). Рукоятка бесконтактного командоаппарата имеет ряд положений, фиксируемых с помощью фрикциона. Выходное напряжение сельсина составляет 0—10 В, выходной ток до 0,4 А. Выходное напряжение сельсина через трансформатор подается в фазочувствительное выпрямительное устройство ФЗУ и далее, после его преобразования, в схему управления. При использовании сельсина в качестве датчика положения на его ротор воздействует перемещающийся механизм. Содержание отчета Тема работы Цель работы Оборудование и материалы Ход работы: схемы и принцип действия электромагнитного контактора постоянного тока, теплового реле, электромагнитного реле времени, герконового реле, сельсинного командоаппарата Контрольные вопросы с ответами в соответствии с вариантом по номеру в журнале. Вывод о проделанной работе

|