Ременная передача. Ременная передача является наиболее распространенним видом передачи гибкой связью в металлорежущих станках.
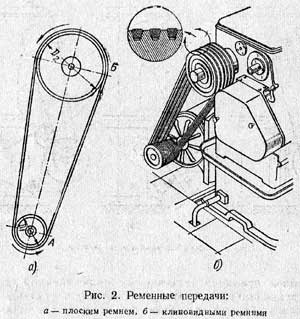
Ременная передача является наиболее распространенним видом передачи гибкой связью в металлорежущих станках. Ременная передача в токарных станках применяется главным образом для передачи вращения приводному шкиву от электродвигателя. На рис. 2, а показана ременная передача, состоящая из двух шкивов А и Б, сидящих на параллельных валах и соединенных бесконечным ремнем. Благодаря натяжению ремня движение от шкива А передается шкиву Б. Шкив А, передающий движение, называется ведущим, а шкив Б, воспринимающий движение от шкива А и передающий его своему валу, называется ведомым. Допустим, что шкив А имеет диаметр D1 = 250 мм, а шкив Б — диаметр D2 — 500 мм. Если ведущий шкив А диаметром D1 = 250 мм сделает один полный оборот, то ведомый шкив Б диаметром D2 — 500 мм сделает пол-оборота, так как диаметр шкива А вдвое меньше диаметра шкива Б. Число оборотов в технике принято обозначать буквой n (эн). Следовательно, если ведущий шкив А сделает в данном случае n оборотов в минуту, то ведомый шкив Б сделает Число оборотов ведомого шкива можно вычислить по формуле
где D1 — диаметр ведущего шкива в мм;
Пример 1. Сколько оборотов в минуту сделает ведомый шкив, если диаметр ведущего шкива равен 200 мм, причем этот шкив делает 450 об/мин, а диаметр ведомого шкива равен 300 мм.
откуда
Следует различать передачу плоскими и клиновидными ремнями. Плоские ремни изготовляют из кожи, хлопчатобумажной пряжи и прорезиненной ткани. Для получения бесконечной ленты ремни сшивают посредством сыромятных узких ремешков, склеивают или соединяют металлическими скрепками. Следует указать, что ремень тем больше проскальзывает, чем слабее его натяжение и чем меньшую часть шкива по окружности он охватывает. Ременная передача работает тем лучше, чем больше охватываемая ремнем часть шкива или чем больше угол охвата.
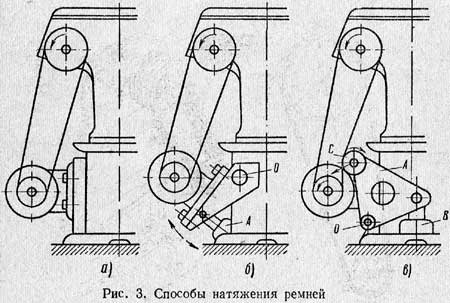
Клиновидные ремни изготовляют из прорезиненной ткани. Они имеют трапецеидальный профиль. Клиновидные ремни натягивают по нескольку в ряд, укладывая их на шкивах в канавки соответствующего профиля (см. рис. 2, б). Проскальзывание таких ремней во время работы незначительно (это обеспечивается хорошим контактом ремней в канавках), и работают они более плавно. В силу этих преимуществ они находят все большее применение в металлорежущих станках. В токарных станках в связи с малыми межосевыми расстояниями, как правило, передачи как клиновидными, так и плоскими ремнями применяются только с натяжным устройством. На рис. 3 показаны различные способы натяжения ремней. Наиболее распространенным способом является натяжение ремня перемещением электродвигателя по салазкам (рис. 3, а). На рис. 3, б показана схема регулирования натяжения ремня поворотом электродвигателя вокруг оси О; поворот осуществляется с помощью домкрата A. Требуемого натяжения ремня и увеличения угла охвата можно добиться, применяя натяжной ролик, как показано на рис. 3, в. Ролик С прижимается к движущемуся ремню с помощью рычага А при поворачивании его вокруг оси О; натяжение ремня регулируется домкратом В.
|
 оборотов.
оборотов. (1)
(1)