Атомно-силовой микроскоп (АСМ) был изобретён в 1986 году Гердом Биннигом, Кэлвином Куэйтом и Кристофером Гербером. В основе работы АСМ лежит силовое взаимодействие между зондом и поверхностью, для регистрации которого используются специальные зондовые датчики, представляющие собой упругую консоль (кантилевер) с острым зондом на конце (Рис. 3). Сила, действующая на зонд со стороны поверхности, приводит к изгибу консоли. Регистрируя величину изгиба, можно контролировать силу взаимодействия зонда с поверхностью [6].
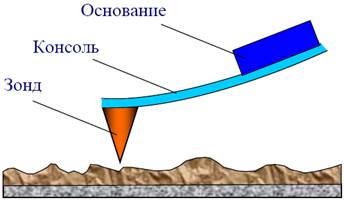 Рисунок 3. Схематическое изображение зондового датчика АСМ [6].
Рисунок 3. Схематическое изображение зондового датчика АСМ [6].
|
Оптическая система регистрации малых изгибов кантилевера (Рис. 4) состоит из полупроводникового лазера, луч которого фокусируется на зеркальной поверхности кантилевера, и разделенного на секции фотоприемника, дифференциальный ток которого усиливается и используется для определения деформации кантилевера [6].
 Рис. 4. Схема оптической регистрации изгиба консоли [5].
Рис. 4. Схема оптической регистрации изгиба консоли [5].
|
В режиме получения топографического изображения исследуемой поверхности зондовый датчик сканирует заданный участок, перемещаясь при помощи прецизионных пьезо-приводов. Кроме получения топографического снимка поверхности, АСМ используется и для силовых измерений. Для того чтобы методом атомно-силовой микроскопии измерить силу взаимодействия между зондом и образцом нужно закрепить образец на жесткой подложке, после чего зонд плавно подводится к поверхности, используя только вертикальный привод. Сразу после касания зонд поднимается обратно до отрыва, при этом фиксируется изгиб кантилевера, значение которого (при известном законе, связывающем силу с отклонением балки) позволяет определить силу взаимодействия между зондом и исследуемой поверхностью (Рис. 5) [5].
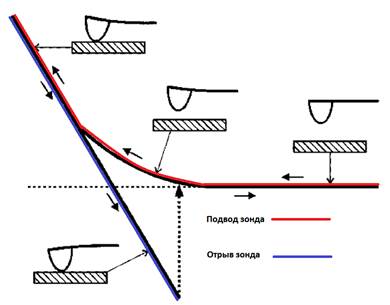 Рисунок 5. Схема силового измерения [7].
Рисунок 5. Схема силового измерения [7].
|




