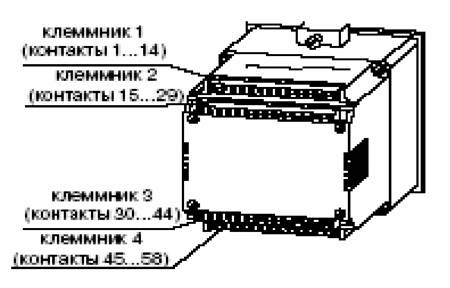
Схема подключения прибора
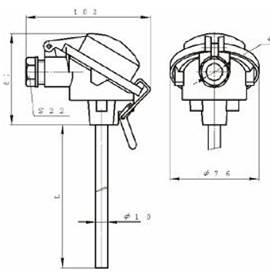
Измерение температуры: Температура измеряется с помощью термопреобразователей сопротивления. Это могут быть медные датчики ТСМ 50М (R0 = 50 Ом), ТСМ 100М (R0 = 100 Ом) и платиновые датчики ТСП 50П (R0 = 50 Ом), ТСП 100П (R0 = 100 Ом).
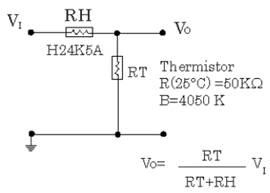
Определение положения задвижки с помощью резистивного датчика:
Регулятор – это устройство, осуществляющее регулирование определённой величины, т.е. поддержание этой величины равной установке или управление изменением этой величины. Регулятор может осуществлять любой из указанных ниже законов регулирования, в зависимости от свойств управляемого объекта: пропорционально – интегрально – дифференциальный (ПИД) закон; пропорциональный (П) закон; пропорционально-интегральный (ПИ) закон; пропорционально-дифференциальный (ПД) закон; релейный (Т) закон. В расчётной части курсовой работы осуществляется подбор закона регулирования и его параметров, откуда известно, что регулятор будет реализовывать ПИ – закон. Пропорционально – интегральное регулирование (ПИ – закон) При работе прибора в режиме ПИ – регулятора величина выходного сигнала Yi зависит как от величины рассогласования E, так и от суммы предыдущих рассогласований:
где Xp — полоса пропорциональности; Ei — отклонение; Из рисунка видно, что в первый момент времени, когда нет отклонения (Ei = 0), нет и выходного сигнала (Yi = 0). С появлением отклонения Ei появляются импульсы, длительность которых постепенно увеличивается. В импульсах присутствует пропорциональная составляющая, которая зависит от величины E (не заштрихованная часть импульсов) и интегральная составляющая (заштрихованная часть). Увеличение длительности импульсов происходит за счет роста интегральной составляющей, которая зависит от рассогласования Ei и коэффициента
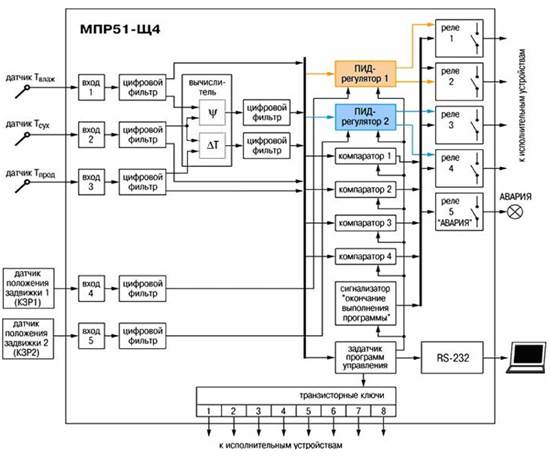
Рис. 4 Структурная схема прибора Структурная схема содержит:
|


 и — постоянная времени интегрирования;
и — постоянная времени интегрирования;  — накопленная в i_й момент времени сумма рассогласований (интегральная сумма).
— накопленная в i_й момент времени сумма рассогласований (интегральная сумма).