
Нечёткий регулятор
Нечёткий регулятор — регулятор, построенный на базе нечеткой логики. Нечеткое управление используется при недостаточном знании объекта управления, но наличии опыта управления им, в нелинейных системах, идентификация которых слишком трудоемка, а также в случаях, когда по условию задачи необходимо использовать знания эксперта. Примером может быть доменная печь или ректификационная колонна, математическая модель которых содержит много эмпирических коэффициентов, изменяющихся в широком диапазоне и вызывающих большие затруднения при идентификации. В то же время квалифицированный оператор достаточно хорошо управляет такими объектами, пользуясь показаниями приборов и накопленным опытом. Поскольку информация, полученная от оператора, выражена словесно, для ее использования применяют лингвистические переменные и аппарат теории нечетких множеств, который был разработан Л. Заде в 1965 году. В 1974 году Мамдани показал возможность применения идей нечеткой логики для построения системы управления динамическим объектом, а годом позже вышла публикация, в которой описывался нечеткий ПИ-регулятор и его применения для управления парогенератором. С тех пор область применения нечетких регуляторов постоянно расширяется, увеличивается разнообразие их структур и выполняемых функций. Одна из наиболее распространенных структур нечеткого регулятора (нечеткого ПИ-регулятора):
На вход регулятора поступает ошибка Далее обе величины сначала подвергаются операции фаззификации (преобразования в нечеткие переменные). Затем полученные нечеткие переменные используются в блоке нечеткого логического вывода для получения управляющего воздействия на объект, которое после выполнения операции дефаззификации (обратного преобразования нечетких переменных в четкие) поступает на выход регулятора в виде управляющего воздействия Регулирование над нечеткими переменными строится на основании высказываний оператора, сформулированных в виде нечетких правил типа: «Если…, то….». Совокупность нечетких правил и нечетких переменных используется для осуществления нечеткого логического вывода, результатом которого является управляющее воздействие на объект управления. Для нечетких множеств существует общепринятая система обозначений: N - отрицательный (Negative); Z - нулевой (Zero); P - положительный (Positive); к этим обозначениям добавляют буквы: S (малый, Small), М (средний, Medium), L (большой, Large). Например: NL - отрицательный большой; NM - отрицательный средний (Negative Medium); PL - положительный большой. Количество таких переменных (термов) может быть любым, однако с увеличением их количества существенно возрастают требования к опыту эксперта, который должен сформулировать правила для всех комбинаций входных переменных. Если величина ошибки
Предположим, что область изменения ошибки
Используя правила, можно получить значение управляющей переменной
|

 и вычисляется ее производная по времени
и вычисляется ее производная по времени  .
. .
. , то соответствующее значение нечеткой переменной будет равно
, то соответствующее значение нечеткой переменной будет равно  со степенью принадлежности подмножеству
со степенью принадлежности подмножеству  , или равно
, или равно  со степенью принадлежности
со степенью принадлежности  . Степень принадлежности ошибки
. Степень принадлежности ошибки  и др.) равна нулю. Таким образом, величина ошибки
и др.) равна нулю. Таким образом, величина ошибки 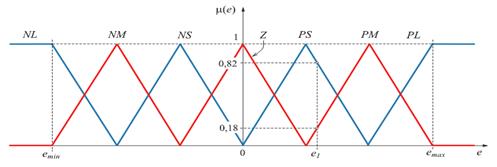

 , область изменения управляющего воздействия - на множества
, область изменения управляющего воздействия - на множества  и что с помощью эксперта удалось сформулировать следующие правила работы регулятора в виде таблицы:
и что с помощью эксперта удалось сформулировать следующие правила работы регулятора в виде таблицы: на выходе нечеткого регулятора. Для этого нужно найти функцию принадлежности переменной
на выходе нечеткого регулятора. Для этого нужно найти функцию принадлежности переменной 


