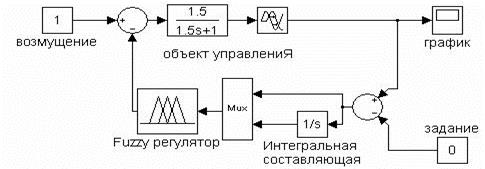
Модель одноконтурной системы автоматического регулирования с использованием fuzzy-регулятора, реализующего ПИ-закон регулирования.
Создадим нечёткую систему, реализующую типовой аналоговый ПИ-регулятор. Тип системы - Мамдани, задаём два входа - для пропорциональной и интегральной составляющих и называем входные переменные, например, x1 и x2, а выходную - y. Теперь необходимо сформировать базу правил fuzzy-регулятора. Линейный непрерывный ПИ-регулятор с передаточной функцией:
можно заменить близким по стратегии и логике управления fuzzy-регулятором, если в качестве его выходной переменной рассматривать приращение управляющего воздействия Δy. Тогда закон регулирования (*) можно представить в следующей дифференциальной форме:
или в разностной форме:
Таким образом, для входных переменных ε(k) и Δε(k) и выходной Δy(k) может быть синтезирован fuzzy-регулятор, реализующий нелинейный закон и эквивалентный в определённом смысле ПИ-регулятору:
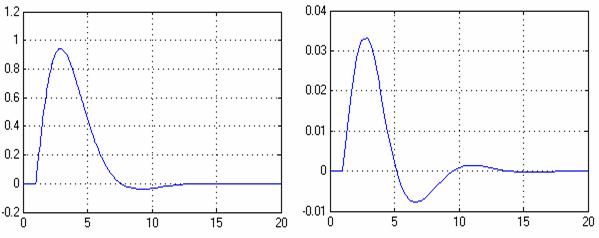
Переходные процессы для модели с аналоговым регулятором и модели с fuzzy-регулятором: модель с аналоговым регулятором модель с fuzzy-регулятором
Сравнение fuzzy-регулятора с аналоговым регулятором: • динамическая ошибка fuzzy-регулятора значительно меньше; • с помощью нечетких алгоритмов управления возможно выполнение оптимизации сложных контуров регулирования без проведения всесторонних математических исследований; • в случаи, когда достаточно информации для получения точной математической модели объекта, аналоговый регулятор всегда будет лучше нечеткого потому, что при синтезе нечеткого регулятора исходные данные заданы приближенно. Достоинства нечётких регуляторов: • Возможность обработки неполной информации; • Выдаются обоснованные решения, что позволяет использовать их для наблюдения за технологическими процессами в реальном времени; • уменьшается вмешательство оператора в процесс управления; • обеспечиваются более высокие показатели качества переходных процессов Области практического применения § Используются самостоятельно, для выполнения функций линейного преобразователя при автоматическом управлении. § Используются в составе комбинированных систем оптимального управления, у которых в прямом контуре задействованы обычные регуляторы, а в дополнительном контуре используются нечёткие регуляторы, которые подстраивают коэффициенты усиления регулятора прямого контура в зависимости от изменяющихся условий. § Используются при решении задач алгоритмической обработки информации от изучаемого объекта (задачи фильтрации). § В помехозащищённых адаптивных системах автоматического управления. § В системах с нечёткой последовательной процедурой проверки статистических гипотез.
|

 ,
, .
.