
Ротором
Активное сопротивление фазы обмотки статора двигателя с короткозамкнутым ротором рассчитывается так же, как и для двигателя с фазным ротором, Активное сопротивление фазы короткозамкнутого ротора определяется следующим образом. Как говорилось выше, за фазу обмотки, выполненной в виде беличьей клетки, принимают один стержень и два участка замыкающих колец (см. рис. 5.4). Токи в стержнях и замыкающих кольцах различны, поэтому их сопротивления при расчете общего сопротивления фазы должны быть приведены к одному току. Таким образом, сопротивление фазы короткозамкнутого ротора r 2 является расчетным параметром, полученным из условия равенства электрических потерь в сопротивлении r 2 от тока I 2 и суммарных потерь в стержне и участках замыкающих колец соответственно от тока в стержне I с и тока в замыкающем кольце I кл реальной машины:
где I с — ток в стержне ротора; I кл — ток в замыкающих кольцах; r с - сопротивление стержня; r кл — сопротивление участка замыкающего кольца, заключенного между двумя соседними стержнями (см. рис. 5.4).
Ток I с называют током ротора и в расчетах обозначают I 2. Учитывая, что
где
здесь
В этих выражениях I с - полная длина стержня, равная расстоянию между замыкающими кольцами, м; D кл ср - средний диаметр замыкающих колец, м (см. рис. 5.6),
q c - сечение стержня, м; k r — коэффициент увеличения активного сопротивления стержня от действия эффекта вытеснения тока; при раcчете рабочих режимов в пределах изменения скольжения от холостого хода до номинального для всех роторов принимают k r = 1; q КЛ — площадь поперечного сечения замыкающего кольца, м2; р с и р кл - соответственно удельные сопротивления материала стержня и замыкающих колец, Ом-м, при расчетной температуре (см. табл. 7.5).
Таблица 7.5 Удельное электрическое сопротивление материала проводников обмоток
Примечание. Удельное сопротивление алюминия после заливки в пазы машины несколько повышается в связи с образованием некоторого количества раковин (воздушных включений) и изменением структуры при охлаждении в узких пазах. Поэтому в расчетах принимают участие сопротивление литой алюминиевой обмотки роторов асинхронных машин равным
Сопротивление r 2 для дальнейших расчетов должно быть приведено к числу витков первичной обмотки. Выражение коэффициента приведения для сопротивления фазы короткозамкнутого ротора получают, подставляя в (7.20) значения m 2 = Z 2 , w 2=l/2, k oб2 = 1 и учитывая влияние скоса пазов:
где коэффициент скоса пазов по (3.17)
Обычно значения bск выражают в долях зубцового деления ротора t Z2. При скосе пазов ротора на одно зубцовое деление статора gСК = p2 p / Z l. В этом случае в двигателях с 2р = 2 из-за малости угла gСК принимают k ск=1. Приведенное значение активного сопротивления фазы обмотки короткозамкнутого ротора
Индуктивное сопротивление рассеяния обмотки статора асинхронного двигателя с короткозамкнутым ротором рассчитывается по той же формуле, что и для статора с фазными роторами, т.е.
Входящий в формулу коэффициент магнитной проводимости пазового рассеяния lп определяется в зависимости от конфигурации пазов по формулам табл. 7.6. Коэффициент магнитной проводимости лобового рассеяния lл определяется по (7.47). Коэффициент магнитной проводимости дифференциального рассеяния lд1 определяют по формуле
в которой x находится следующим образом. При открытых пазах статора и отсутствии скоса статора или ротора
При полузакрытых или полуоткрытых пазах статора с учетом скоса пазов
В этих формулах t Z1 и t Z2 – зубцовые деления статора и ротора; DZ определяют по кривой рис. 7.5, а, k b определяют по (7.24) или (7.27); bск = b CK/ t z2 – скос пазов, выраженный в долях зубцового деления ротора. При отсутствии скоса пазов b ск = 0; k 'ск определяют по кривым рис. 7.5, д в зависимости от t Z2/ t Z1 и bск (при отсутствии скоса пазов — по кривой, соответствующей bск = 0). Индуктивное сопротивление обмотки короткозамкнутого ротора определяют по формуле
полученной после подстановки в (7.21) значений m 2 = Z 2 и q 2 = 1/(2р) обмотки короткозамкнутого ротора и введения дополнительного слагаемого lск.
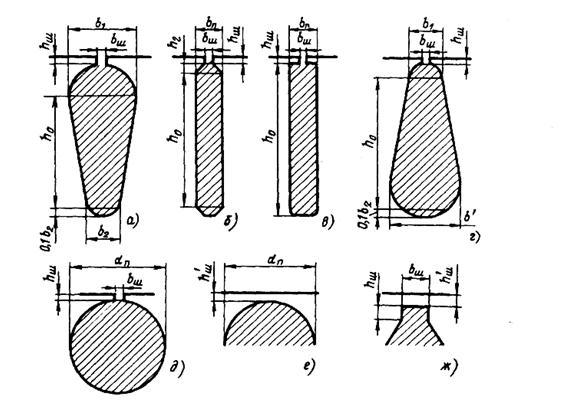
Коэффициент магнитной проводимости пазового рассеяния обмотки короткозамкнутого ротора рассчитывается по приведенным в табл. 7.5 формулам в зависимости от конфигурации паза ротора (рис. 7.6).
Таблица 7.5 Расчетные формулы для определения коэффициентов магнитной проводимости пазового рассеяния короткозамкнутых роторов
При расчете номинального режима двигателя во всех формулах k д= 1. При закрытых пазах ротора любой конфигурации (рис. 7.6, а-д) в расчетных формулах табл. 7.5 нужно при шлицах по рис. 7.6, е слагаемые h ш/ b ш заменить на 0, 3+1, 12•106 h ш/ I 2; по рис. 7.6, ж - на h ш/ b ш + 1, 12· 106 h ш/ I 2, где h ш - толщина ферромагнитной перемычки над пазом, м; I 2 — ток ротора, А.
Рис. 7.6. К расчету коэффициентов магнитной проводимости пазового рассеяния короткозамкнутых роторов: а-д — полузакрытые пазы; е, ж — закрытые пазы
Коэффициент магнитной проводимости лобового рассеяния рассчитывают в зависимости от размеров и расположения замыкающих колец обмотки по следующим формулам. В роторах с литыми обмотками при замыкающих кольцах, прилегающих к торцам сердечника ротора (см. рис. 5.6, а), используют формулу
Если замыкающие кольца отставлены от торцов ротора (см. рис. 5.6, б), как, например, в обмотке, выполненной из медных или
латунных стержней, впаянных в замыкающие кольца, расчет проводят по формуле
В этих формулах D кл.ср — средний диаметр замыкающих колец по (7.40); D = 2sinp r / Z 2 — коэффициент приведения токов в кольце к току в стержне; h кл и b кл — средние высота и ширина колец (см. рис. 5.6); l ¢ d — по (7.23).
Коэффициент магнитной проводимости дифференциального рассеяния обмотки короткозамкнутого ротора
где
Δ Z находят по кривым рис. 7.5, а. Как видно из (7.50), при большом числе пазов ротора, приходящихся на пару полюсов, Z 2/ p ³ 10, без заметной погрешности можно принять x=1. Коэффициент проводимости скоса, учитывающий влияние на ЭДС обмотки ротора скоса пазов,
где bСК – скос пазов, выраженный в зубцовых делениях ротора. При скосе пазов на одно зубцовое деление ротора bск = 1; km – коэффициент насыщения магнитной цепи (по 6.27). Приведенное к числу витков обмотки статора индуктивное сопротивление обмотки короткозамкнутого ротора x' 2 = x 2 γ 12, (7.52) где γ 12 определяется по (7.41). Сопротивление схемы замещения r m (см. рис. 7.1, а) является расчетным. Введением его в схему замещения учитывают влияние потерь в стали статора на процессы в асинхронной машине, поэтому значение сопротивления r m должно быть принято таким, чтобы выделяющаяся в нем активная мощность была равна мощности, затрачиваемой на потери в стали в реальной машине и отнесенной к одной фазе. Таким образом,
r m= Р ст/(mI 20a), так как активные потери в стали определяются активной составляющей тока холостого хода I 0a. Сопротивление взаимной индукции обмоток статора и ротора х m по схеме замещения может быть определено как х m = E 1/ I m. В расчетной практике параллельное включение сопротивлений r m и х m оказалось удобнее заменить последовательно включенными сопротивлениями r 12 и х 12 (см. рис. 7.1, б), значения которых определяют из условия
откуда
Так как в асинхронных машинах Сопротивления r 12 и x 12 с достаточной для обычных расчетов точностью определяют по следующим формулам:
Относительные значения параметров. Для удобства сопоставления параметров отдельных машин и упрощения расчета характеристик параметры асинхронных машин выражают в относительных единицах, принимая за базисные значения номинальное фазное напряжение и номинальный фазный ток статора. Значения параметров, выраженные в относительных единицах, будем отмечать звездочкой:
Относительные значения одних и тех же параметров схемы замещения различных асинхронных двигателей нормального исполнения незначительно отличаются друг от друга. Так, относительные значения индуктивных сопротивлений рассеяния обмотки статора и приведенного сопротивления обмотки ротора большей частью находятся в пределах x 1 = 0, 08¸ 0, 14 и х '2 = 0, 1¸ 0, 16. Относительные значения сопротивлений взаимной индукции, как правило, в 30—40 раз больше, чем х 1*. Обычно х 12* = 2 ¸ 4. Относительные значения активных сопротивлений обмотки статора и приведенного сопротивления обмотки ротора близки друг к другу и обычно составляют несколько сотых долей: r 1*» r ¢ 2*» 0, 02¸ 0, 03; лишь в машинах малой мощности их значения несколько увеличиваются. Сопротивление r 12* обычно составляет 0, 05–0, 2.
|
 (7.35)
(7.35) (7.36)
(7.36) из 7.36 получаем
из 7.36 получаем (7.37)
(7.37) (7.38)
(7.38) (7.39)
(7.39) (7.40)
(7.40)








 Ом∙ м при температуре 75°С и
Ом∙ м при температуре 75°С и  Ом∙ м при температуре 115°С.
Ом∙ м при температуре 115°С. (7.41)
(7.41)

 (7.42)
(7.42)
 (7.43)
(7.43) (7.44)
(7.44) (7.45)
(7.45) (7.46)
(7.46)



 (7.47)
(7.47) (7.48)
(7.48) (7.49)
(7.49) (7.50)
(7.50) (7.51)
(7.51)
 и
и 
 m ³ хm, то х12»xm, а r 12£ x 12, В связи с этим значение r 12 не играет заметной роли при анализе процессов в машине, и в расчетах им часто пренебрегают.
m ³ хm, то х12»xm, а r 12£ x 12, В связи с этим значение r 12 не играет заметной роли при анализе процессов в машине, и в расчетах им часто пренебрегают. (7.53)
(7.53) . (7.54)
. (7.54)

 (7.55)
(7.55)




