Примеры решения задачи 1
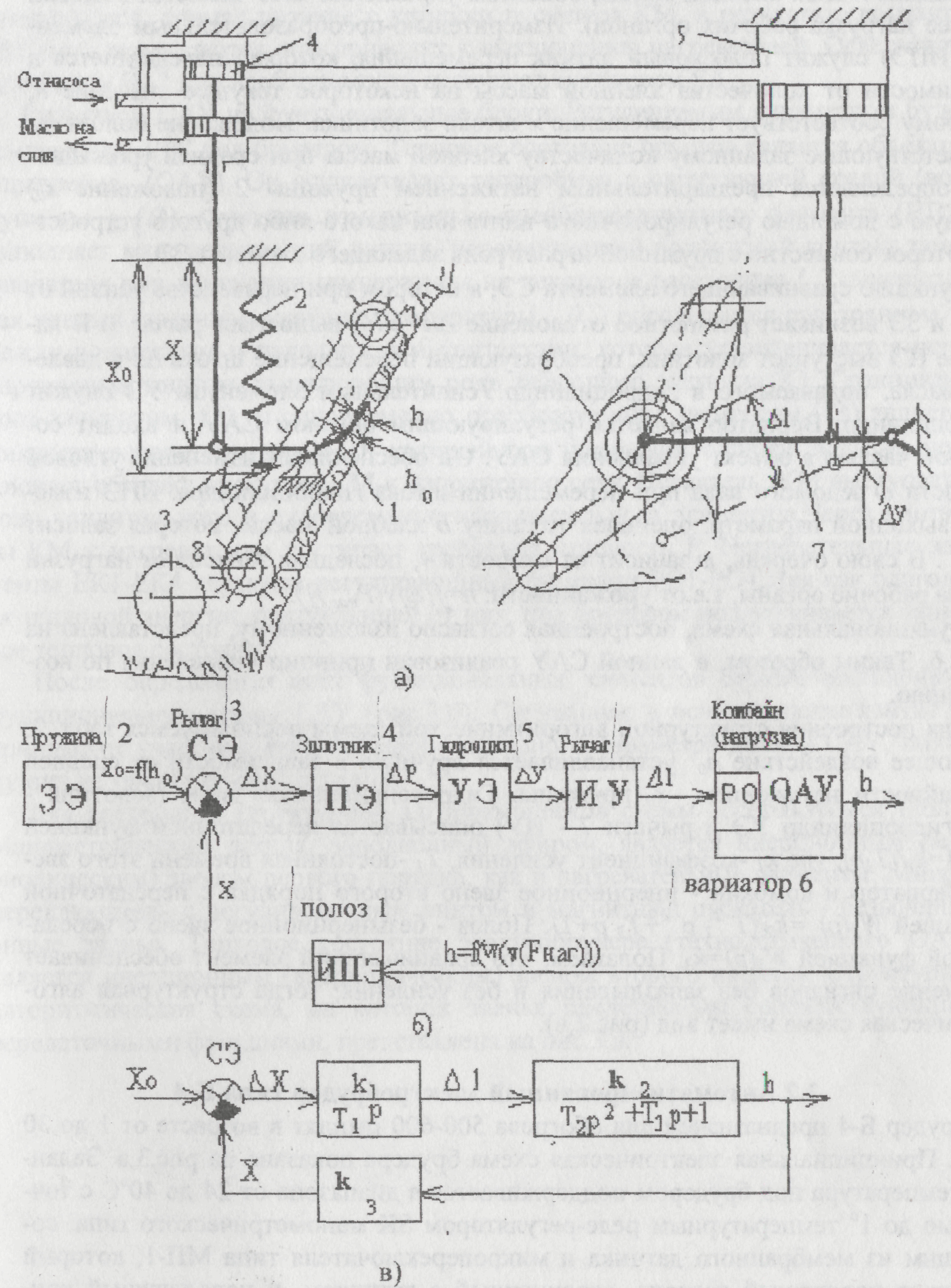
2.1. Система автоматического управления нагрузкой рабочих органов зерноуборочного комбайна. САУ нагрузкой рабочих органов комбайна призвана обеспечить, возможно максимальную производительность комбайна при наименьших потерях зерна. На рис. 2а приведена принципиальная схема САУ, которая поддерживает постоянство поступления зерновой массы в молотильное устройство путём изменения скорости комбайна в зависимости от распределения урожая по полю. Система работает следующим образом. Когда хлебная масса, поступающая в комбайн, увеличивается по сравнению с заданной, полозковый датчик 1 перемещения передвигается, преодолевая сопротивление пружины 2. Возникающее при этом перемещение рычага вызывает движение плунжера золотника 4, что влечет за собой изменение давления на поршень гидроцилиндра 5, шток которого воздействует на вариатор ходовой части 6, в результате чего изменяется передаточное отношение, и скорость комбайна уменьшается. При уменьшении хлебной массы процессы происходят в обратной последовательности,
Рис.2. Принципиальная (а), обобщённая функциональная (б) и структурная алгоритмическая (в) схемы САУ нагрузкой рабочих органов зерноуборочного комбайна
вызывая увеличение скорости комбайна. Управляемым параметром САУ является толщина h слоя хлебной массы, объектом управления САУ является комбайн (точнее нагрузка рабочих органов). Измерительно-преобразовательным элементом (ИПЭ) служит полозковый датчик перемещения, который передвигается в зависимости от количества хлебной массы на некоторое текущее значение h, которому соответствует перемещение х; штока золотника. Положение полоза h0, соответствующее заданному количеству хлебной массы при средней урожайности, определяется предварительным натяжением пружины 2 (положение х0) вручную с помощью регулировочного винта или какого-либо другого устройства, которое совместно с пружиной играет роль задающего элемента ЗЭ. Функцию сравнивающего элемента СЭ, в котором при неравенстве усилий от ИПЭ и ЗЭ возникает разностное отклонение ∆h=h-h0, выполняет рычаг 3. В качестве ПЭ выступает золотник, преобразующий перемещение штока ∆х в давление масла, подаваемого в гидроцилиндр. Усилительным элементом УЭ служит гидроцилиндр. Вариатор является регулирующим органом САУ и входит составной частью в объект управления ОАУ. Он обеспечивает изменение угловой скорости ω ведомого вала при перемещении штока гидроцилиндра. ИПЭ измеряет выходной параметр, оценивая толщину h хлебной массы, которая зависит от ω. В свою очередь, ω зависит от скорости v, последняя зависит от нагрузки Рнаг на рабочие органы, т.е. от урожайности: h=f{ ω [v(PHas)]}. Функциональная схема, построенная согласно изложенному, представлена на рис.2,б. Таким образом, в данной САУ реализован принцип управления по возмущению. Для построения структурной алгоритмической схемы воспользуемся табл. 2. Задающее воздействие h0 устанавливается вручную в зависимости от средней урожайности натяжением х0 пружины. Гидроусилительное звено (золотник -ПЭ, гидроцилиндр УЭ и рычаги 7 - ИУ) описывается передаточной функцией W1(p)=k1/(Tlp), где k1 - коэффициент усиления, Т1 - постоянная времени этого звена. Вариатор и комбайн - инерционное звено второго порядка с передаточной функцией W2(p) =k2/(T22p 2+Т3р+1). Полоз - безынерционное звено с передаточной функцией W3(p)=k3. Полагаем, что сравнивающий элемент обеспечивает сравнение сигналов без запаздывания и без усиления, тогда структурная алгоритмическая схема имеет вид (рис.2,в).
|