Эластичная штукатурка
1) Динамическому торможению;
2) Режиму рекуперативного торможения;
  3) Торможению изменением полярности. 3) Торможению изменением полярности.
|
| 3. Статическому режиму шагового двигателя соответствует:
1) Вращение двигателя с постоянной скоростью;
2) Определённое фиксированное положение ротора;
3) Отсутствие питания обмоток двигателя;
4) Переход двигателя из одного состояния в другое.
|
| 4. Если, один двигатель приводит в движение один рабочий орган то это:
1) Трансмиссионный привод;
2) Следящий привод;
3) Многодвигательный привод;
4) Одиночный привод.
|
5. Режим торможения двигателя соответствует условию:
1  > 0 2) > 0 2)  3) = 0 4) < 0 3) = 0 4) < 0
|
6. Жёсткость равную β; =  имеет механическая характеристика:
1) Асинхронного двигателя;
2) Двигателя постоянного тока со смешанным возбуждением;
3) Синхронного двигателя;
4) Двигателя постоянного тока со смешанным возбуждением. имеет механическая характеристика:
1) Асинхронного двигателя;
2) Двигателя постоянного тока со смешанным возбуждением;
3) Синхронного двигателя;
4) Двигателя постоянного тока со смешанным возбуждением.
|
| 7. Двигатель с параллельным возбуждением является частным случаем:
1). Двигателя со смешанным возбуждением;
2). Двигателя с последовательным возбуждением;
3). Асинхронного двигателя;
4) Двигателя с независимым возбуждением.
|
| 8. При изменении величины напряжения питания в ДПТ, остаётся постоянным:
1) Момент короткого замыкания;
2) Скорость холостого хода;
3) Изменяются все параметры;
4) Жёсткость характеристик.
|
| 9. Режим холостого хода не реализуется
1) В В электроприводе с шаговым двигателем;
2) В электроприводе с асинхронным двигателем;
3) В электроприводе с двигателем постоянного тока с последовательным возбуждением;
4) В электроприводе с двигателем постоянного тока с параллельным возбуждением.
|
| 10. Условию s <0 для АД соответствует:
1) Режим короткого замыкания; 2) Режим рекуперативного торможения;
3) Режим холостого хода; 4) Двигательный режим.
|
 11. На рис. представлена схема реализации:
1) Динамического торможения подключением обмоток к сети постоянного тока;
2) Динамического торможения с самовозбуждением;
3) Рекуперативного торможения;
4) Торможения противовключением. 11. На рис. представлена схема реализации:
1) Динамического торможения подключением обмоток к сети постоянного тока;
2) Динамического торможения с самовозбуждением;
3) Рекуперативного торможения;
4) Торможения противовключением.
|
| 12. В асинхронном двигателе скорость холостого хода меняется при:
1) Изменении частоты;
2) Изменении напряжения питания;
3) Изменении сопротивления ротора;
4) Изменении сопротивления статора.
|
 13. Представленная характеристика ДПТ НВ соответствует:
1) Динамическому торможению при условии 13. Представленная характеристика ДПТ НВ соответствует:
1) Динамическому торможению при условии  ;
2) Динамическому торможению с использованием добавочного сопротивления;
3) Режиму рекуперативного торможения;
4) Торможению изменением полярности (противовключение). ;
2) Динамическому торможению с использованием добавочного сопротивления;
3) Режиму рекуперативного торможения;
4) Торможению изменением полярности (противовключение).
|
| 14. Если, рабочий орган приводится в движение совокупностью двигателей то это:
1) Следящий привод;
2) Трансмиссионный привод;
3) Одиночный привод;
4) Многодвигательный привод.
|
15. Для двигателя постоянного тока с независимым возбуждением жёсткость будет равна:
1) β; = const < 0 2) β; = 3) β; = var < 0 4) β; = β; = var  0. 0.
|
| 16. При изменении потока возбуждения ДПТ, остаётся постоянным:
1) Изменяются все параметры;
2) Жёсткость характеристики;
3) Момент короткого замыкания;
4) Скорость холостого хода.
|
 17. Механическую характеристику вида (рис.) имеет:
1) Электропривод с двигателем постоянного тока со смешанным возбуждением;
2) Электропривод с двигателем постоянного тока с последовательным возбуждением;
3) Электропривод с шаговым двигателем;
4) Электропривод с асинхронным двигателем. 17. Механическую характеристику вида (рис.) имеет:
1) Электропривод с двигателем постоянного тока со смешанным возбуждением;
2) Электропривод с двигателем постоянного тока с последовательным возбуждением;
3) Электропривод с шаговым двигателем;
4) Электропривод с асинхронным двигателем.
|
 18. Механическую характеристику вида (рис.) имеет:
1) Электропривод с асинхронным двигателем;
2) Электропривод с синхронным двигателем;
3) Электропривод с двигателем постоянного тока с независимым возбуждением;
4) Электропривод с двигателем постоянного тока с последовательным возбуждением. 18. Механическую характеристику вида (рис.) имеет:
1) Электропривод с асинхронным двигателем;
2) Электропривод с синхронным двигателем;
3) Электропривод с двигателем постоянного тока с независимым возбуждением;
4) Электропривод с двигателем постоянного тока с последовательным возбуждением.
|
19. Режим холостого хода соответствует условию:
1)  2) 2)  3) 3)  4) 4)
|
 20. Представленное семейство характеристик соответствует
1) Регулированию скорости электропривода изменением питающего напряжения;
2) Частотному регулированию скорости электропривода;
3) Регулированию скорости электропривода изменением магнитного потока;
4) Реостатному регулированию скорости электропривода. 20. Представленное семейство характеристик соответствует
1) Регулированию скорости электропривода изменением питающего напряжения;
2) Частотному регулированию скорости электропривода;
3) Регулированию скорости электропривода изменением магнитного потока;
4) Реостатному регулированию скорости электропривода.
|
21.  это:
1) относительная продолжительность переходного режима;
2) относительная продолжительность включения двигателя;
3) относительная продолжительность включения питания;
4) относительная продолжительность включения механизма. это:
1) относительная продолжительность переходного режима;
2) относительная продолжительность включения двигателя;
3) относительная продолжительность включения питания;
4) относительная продолжительность включения механизма.
|
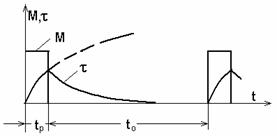
 22. На рис. приведена:
1) нагрузочная диаграмма для режима S3;
2) нагрузочная диаграмма для режима S4;
3) нагрузочная диаграмма для режима S1;
4) нагрузочная диаграмма для режима S2. 22. На рис. приведена:
1) нагрузочная диаграмма для режима S3;
2) нагрузочная диаграмма для режима S4;
3) нагрузочная диаграмма для режима S1;
4) нагрузочная диаграмма для режима S2.
|
| 23. Выбор двигателя осуществляется по методу
1) средних потерь;
2) среднего напряжения;
3) средней энергии;
4) средней скорости.
|
24. Эквивалентный ток двигателя равен:
1)  ; 2) ; 2)  ; 3) ; 3)  ; 4) ; 4) 
|
25. На рис. представлена часть схемы:
1) пуска ДПТ в функции ЭДС якоря двигателя;
2) пуска ДПТ в функции мощности;
3) пуска ДПТ в функции тока якоря двигателя;
 4) пуска ДПТ в функции времени 4) пуска ДПТ в функции времени
|
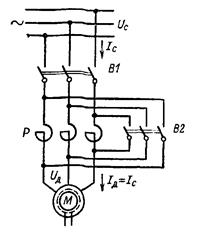
 26. На рис. представлена схема:
1) Управление пуском АД с короткозамкнутым ротором с командоконтроллером;
2) Управления пуском АД с фазным
ротором с реверсивным пускателем;
3) Управление пуском АД с короткозамкнутым ротором с командоконтроллером;
4) Управление пуском СД с реверсивным пускателем. 26. На рис. представлена схема:
1) Управление пуском АД с короткозамкнутым ротором с командоконтроллером;
2) Управления пуском АД с фазным
ротором с реверсивным пускателем;
3) Управление пуском АД с короткозамкнутым ротором с командоконтроллером;
4) Управление пуском СД с реверсивным пускателем.
|
27. На рис. представлена:
1) Схема управления пуском СД с фазным ротором в функции ЭДС
2) Схема управления пуском АД с фазным ротором в функции времени
3) Схема управления пуском АД с фазным ротором в функции тока
 4) Схема управления пуском СД с фазным ротором в функции времени 4) Схема управления пуском СД с фазным ротором в функции времени
|
| 28. Обратные связи в САУ электроприводов бывают:
1) постоянные и переменные;
2) простые и сложные;
3) линейные и нелинейные;
4) положительные и отрицательные.
|
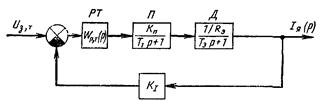
 29. На рис. представлена:
1) Структурная схема САР угловой скорости с положительной обратной связью по току
2) Структурная схема САР угловой скорости с отрицательно обратной связью по току
3) Структурная схема САР угловой скорости с отрицательной обратной связью по напряжению
4) Структурная схема САР угловой скорости
с отрицательной обратной связью по возбуждению 29. На рис. представлена:
1) Структурная схема САР угловой скорости с положительной обратной связью по току
2) Структурная схема САР угловой скорости с отрицательно обратной связью по току
3) Структурная схема САР угловой скорости с отрицательной обратной связью по напряжению
4) Структурная схема САР угловой скорости
с отрицательной обратной связью по возбуждению
|
 30. На рис. представлена:
1) Структурная схема САР угловой скорости;
2) Структурная схема САР угловой скорости с отрицательно обратной связью по току
3) Структурная схема САР угловой скорости с отрицательной обратной связью по напряжению
4) Структурная схема САР угловой скорости с положительной обратной связью по току. 30. На рис. представлена:
1) Структурная схема САР угловой скорости;
2) Структурная схема САР угловой скорости с отрицательно обратной связью по току
3) Структурная схема САР угловой скорости с отрицательной обратной связью по напряжению
4) Структурная схема САР угловой скорости с положительной обратной связью по току.
|
 31. На рис. представлена:
1) Структурная схема асинхронного электропривода с регулированием скорости по система Г-Д;
4) Структурная
2) Структурная схема асинхронного электропривода с регулированием скорости по системе УВ-Д;
3) Структурная схема асинхронного электропривода с тиристорным регулятором скорости;
4) Структурная схема асинхронного электропривода с тиристорным регулятором напряжения. 31. На рис. представлена:
1) Структурная схема асинхронного электропривода с регулированием скорости по система Г-Д;
4) Структурная
2) Структурная схема асинхронного электропривода с регулированием скорости по системе УВ-Д;
3) Структурная схема асинхронного электропривода с тиристорным регулятором скорости;
4) Структурная схема асинхронного электропривода с тиристорным регулятором напряжения.
|
32. На рис. представлена:
1) замкнутая САР электропривода с положительными обратными связями;
2) разомкнутая САР электропривода;
 3) принципиальная электрическая схема электропривода;
4) принципиальная электрическая схема электропривода; 3) принципиальная электрическая схема электропривода;
4) принципиальная электрическая схема электропривода;
|
 33. На рис. представлена:
1) принципиальная электрическая схема привода с ДПТ ПВ по системе УВ-Д;
2) принципиальная электрическая схема привода с ДПТ СВ по системе УВ-Д;
3) принципиальная электрическая схема привода с ДПТ НВ по системе МУ-Д;
4) принципиальная электрическая схема привода с ДПТ НВ по системе СТК-Д;
принципиальная электрическая схема привода с ДПТ СВ по системе УВ-Д. 33. На рис. представлена:
1) принципиальная электрическая схема привода с ДПТ ПВ по системе УВ-Д;
2) принципиальная электрическая схема привода с ДПТ СВ по системе УВ-Д;
3) принципиальная электрическая схема привода с ДПТ НВ по системе МУ-Д;
4) принципиальная электрическая схема привода с ДПТ НВ по системе СТК-Д;
принципиальная электрическая схема привода с ДПТ СВ по системе УВ-Д.
|
34. На рис. представлена:
1) Схема асинхронного преобразователя частоты;
2) Схема вентильно-электромашинного преобразователя частоты;
3) Схема асинхронной муфты скольжения;
 4) Схема системы управления Г-Д.
Схема асинхронной муфты скольжения. 4) Схема системы управления Г-Д.
Схема асинхронной муфты скольжения.
|
35. На рис. представлена:
1) Общая структурная схема электропривода;
2) Общая структурная схема электродвигателя;
 3) Общая структурная схема системы вентильного преобразователя;
4) Общая структурная схема электроснабжения. 3) Общая структурная схема системы вентильного преобразователя;
4) Общая структурная схема электроснабжения.
|
36. На рис. представлена:
1) Принципиальная схема включения ДПТ НВ по системе Г-Д;
2) Принципиальная схема включения ДПТ ПВ по системе ВП-Д;
3) Принципиальная схема включения ДПТ ПВ по системе Г-Д;
 4) Принципиальная схема включения ДПТ ПВ по системе ВП-Д. 4) Принципиальная схема включения ДПТ ПВ по системе ВП-Д.
|
 37. На рис. представлена:
1) Структурная схема контура регулирования скорости;
2) Структурная схема контура регулирования возбуждения;
3) Структурная схема контура регулирования тока;
4) Структурная схема контура регулирования напряжения. 37. На рис. представлена:
1) Структурная схема контура регулирования скорости;
2) Структурная схема контура регулирования возбуждения;
3) Структурная схема контура регулирования тока;
4) Структурная схема контура регулирования напряжения.
|
38. На рис. представлена схема включения резисторов при:
1) торможении ДПТ противовключением;
2) динамическом торможении ДПТ;
3) пуске ДПТс самовозбуждением;
 4) пуске ДПТ без возбуждения
пуск 4) пуске ДПТ без возбуждения
пуск
|
39. На рис. представлена:
1) Принципиальная схема пуска СД по системе Г-Д
2) Принципиальная схема пуска АД с короткозамкнутым ротором по системе Г-Д
3) Принципиальная схема пуска АД с короткозамкнутым ротором с возбудителем
 4) Принципиальная схема пуска СД с глухоподключенным возбудителем 4) Принципиальная схема пуска СД с глухоподключенным возбудителем
|
 40. На рис. представлены зависимости Р, ΔР и Θ от времени для режима:
1) -кратковременного с частыми пусками;
2) кратковременного;
3) повторно-кратковременного;
4) повторно-кратковременного с частыми пусками и электрическим торможением. 40. На рис. представлены зависимости Р, ΔР и Θ от времени для режима:
1) -кратковременного с частыми пусками;
2) кратковременного;
3) повторно-кратковременного;
4) повторно-кратковременного с частыми пусками и электрическим торможением.
|
|
|
|
|
| Вариант 3
|
1. Жёсткость механической характеристики определяется как:
1) β =  2) β = 2) β =  3) β = 3) β =  4) β = 4) β = 
|
| 2. Жёсткость равную β; = var < 0 имеет механическая характеристика:
1) Синхронного двигателя;
2) Асинхронного двигателя;
3) Двигателя постоянного тока с независимым возбуждением;
4) Двигателя постоянного тока с последовательным возбуждением.
|
| 3. Максимальное значение жёсткости в двигателе постоянного тока имеет:
1) Все механические характеристики имеют неизменную жёсткость;
2) Механическая характеристика при реостатном регулировании;
3) Естественная механическая характеристика;
4)Механическая характеристика при ослабленном потоке.
|
4. Механическую характеристику вида (рис.) имеет:
1) Электропривод с асинхронным двигателем;
2) Электропривод с шаговым двигателем;
3) Электропривод с двигателем постоянного тока с последовательным возбуждением;
 4) Электропривод с двигателем постоянного тока со смешанным возбуждением. 4) Электропривод с двигателем постоянного тока со смешанным возбуждением.
|
5. Критический момент для механической харатеристики АД равен:
1)  ; 2) ; 2)  3)
3)  ; 4) ; 4) 
|
 6. Представленное семейство характеристик соответствует:
1) Регулированию скорости электропривода изменением питающего напряжения;
2) Частотному регулированию скорости электропривода;
3) Регулированию скорости электропривода изменением магнитного потока;
4)Реостатному регулированию скорости электропривода. 6. Представленное семейство характеристик соответствует:
1) Регулированию скорости электропривода изменением питающего напряжения;
2) Частотному регулированию скорости электропривода;
3) Регулированию скорости электропривода изменением магнитного потока;
4)Реостатному регулированию скорости электропривода.
|
7. В асинхронном двигателе в момент короткого замыкания скольжение равно:
1)  2) 2)  3) 3)  4) 4) 
|
  8. На рис. представлены механические характеристики
асинхронного двигателя при:
1) Изменении частоты питания;
2) Изменении сопротивления цепи ротора;
3) Изменении сопротивления цепи статора;
4) Изменении напряжения питания. 8. На рис. представлены механические характеристики
асинхронного двигателя при:
1) Изменении частоты питания;
2) Изменении сопротивления цепи ротора;
3) Изменении сопротивления цепи статора;
4) Изменении напряжения питания.
|
 9. Механическую характеристику вида имеет:
1) Электропривод с двигателем постоянного тока с последовательным возбуждением;
2) Электропривод с двигателем постоянного тока с параллельным возбуждением;
3) Электропривод с асинхронным двигателем при изменении сопротивлений в цепи статора;
4) Электропривод с асинхронным двигателем при изменении сопротивлений в ротора. 9. Механическую характеристику вида имеет:
1) Электропривод с двигателем постоянного тока с последовательным возбуждением;
2) Электропривод с двигателем постоянного тока с параллельным возбуждением;
3) Электропривод с асинхронным двигателем при изменении сопротивлений в цепи статора;
4) Электропривод с асинхронным двигателем при изменении сопротивлений в ротора.
|
10.Уравнение движения привода имеет вид:
1)  ; 2) ; 2)  ; 3) ; 3)  ; 4) ; 4) 
|
| 11. Инвертор предназначен для:
1) Преобразования мощности; 2) Преобразования частоты
3) Преобразования тока 4) Преобразования напряжения
|
12. Механическая характеристика АД имеет вид:
1)  ; 2) ; 2)  ;
3) ;
3)  ; 4) ; 4) 
|
| 13. Бесколлекторный двигатель это:
1) Асинхронный двигатель с параллельным возбуждением;
2) Асинхронный двигатель с последовательным возбуждением;
3) Двигатель постоянного тока с фазным ротором;
4) Двигатель постоянного тока с короткозамкнутым ротором.
|
| 14. При увеличении момента на валу синхронного двигателя происходит:
1) Изменение скольжения;
2) Увеличение потребления активной энергии;
3) Увеличение потребления реактивной энергии
3) Изменение скорости.
|
15. На рис. представлены:
1) Механические характеристики АД
при торможении противовключением
2) Механические характеристики ДПТ с
независимым возбуждением;
3) Механические характеристики ДПТ со
смешанным возбуждением;  4) Скоростные характеристики ДПТ с
независимым возбуждением
4) Скоростные характеристики ДПТ с
независимым возбуждением
|
16. Формула угловой характеристики СД имеет вид:
1)  ; 2) ; 2)  ; 3) ; 3)  ; 4) ; 4) 
|
| 17. Регулирование скорости синхронного двигателя осуществляется:
1) Изменением реактивного сопротивления цепи;
2) Изменением частоты;
3) Изменением активного сопротивления цепи;
4) Изменением питающего напряжения.
|
| 18. Изменению чередования фаз в асинхронном двигателе соответствует:
1) Неустойчивый режим;
2) Режим динамического торможения;
3) Генераторный режим;
4) Режим торможения противовключением.
|
 19. На рис. представлены:
1) Механические характеристики АД при регулировании
скорости изменением величины питающего напряжения;
2) Механические характеристики АД при регулировании
скорости изменением частоты питающего напряжения;
3) Механические характеристики АД при регулировании
сопротивления в цепи ротора;
4) Механические характеристики АД при регулировании
скорости изменением сопротивления в цепи статора. 19. На рис. представлены:
1) Механические характеристики АД при регулировании
скорости изменением величины питающего напряжения;
2) Механические характеристики АД при регулировании
скорости изменением частоты питающего напряжения;
3) Механические характеристики АД при регулировании
сопротивления в цепи ротора;
4) Механические характеристики АД при регулировании
скорости изменением сопротивления в цепи статора.
|
| 20. Режим работы двигателя характеризуют:
1) зависимости U, I и S от времени;
2) зависимости Р, I и J от времени;
3) зависимости Р, Q и S от времени;
4) зависимости Р, ΔР и Θ от времени;
|
| 21. Проверка двигателей по нагреву производится
1) по методу Фурье;
2) по методу максимальных установившейся температуры;
3) по методу максимальной потерь;
4) по методу средних потерь
|
22. На рис. приведена:
1) нагрузочная диаграмма для режима S3;
2) нагрузочная диаграмма для режима S4;
3) нагрузочная диаграмма для режима S1;
 4) нагрузочная диаграмма для режима S2 4) нагрузочная диаграмма для режима S2
|
23. Для ступенчатого графика эквивалентная мощность вычисляется по формуле
1)  ; 2) ; 2)  ;
3) ;
3)  ; 4) ; 4) 
|
| 24. Цепи в схемах САУ двигателями подразделяются на:
1) силовые и цепи управления;
2) линейные и не нелинейные;
3) низковольтные и высоковольтные;
4) однофазные и трехфазные.
|
| 25. На рис. представлена схема включения резисторов при:
1) динамическом торможении ДПТ;
2) торможении ДПТ противовключением;
3) пуске ДПТ без возбуждения;
4) торможении ДПТ противовключением.
|
26. На рис. представлена схема:
 1) реверсирования АД с короткозамкнутым ротором;
2) реверсирования АД с фазным ротором;
3) пуска АД с короткозамкнутым ротором в функции тока;
4) пуска АД с фазным ротором в функции времени. 1) реверсирования АД с короткозамкнутым ротором;
2) реверсирования АД с фазным ротором;
3) пуска АД с короткозамкнутым ротором в функции тока;
4) пуска АД с фазным ротором в функции времени.
|
 27. На рис. представлена:
1) Схема управления пуском АД с фазным ротором в функции времени;
2) Схема управления пуском СД с фазным ротором в функции времени;
3) Схема управления пуском АД с фазным ротором в функции тока;
4) Схема управления пуском АД с фазным ротором в функции времени. 27. На рис. представлена:
1) Схема управления пуском АД с фазным ротором в функции времени;
2) Схема управления пуском СД с фазным ротором в функции времени;
3) Схема управления пуском АД с фазным ротором в функции тока;
4) Схема управления пуском АД с фазным ротором в функции времени.
|
 28. На рис. представлена:
1) Структурная схема контура регулирования скорости;
2) Структурная схема контура регулирования вохбуждения;
3) Структурная схема контура регулирования тока;
4) Структурная схема контура регулирования напряжения. 28. На рис. представлена:
1) Структурная схема контура регулирования скорости;
2) Структурная схема контура регулирования вохбуждения;
3) Структурная схема контура регулирования тока;
4) Структурная схема контура регулирования напряжения.
|
 29. На рис. представлена:
1) Принципиальная схема включения ДПТ ПВ по системе ВП-Д
2) Принципиальная схема включения ДПТ НВ по системе Г-Д
3) Принципиальная схема включения ДПТ НВ по системе УВ-Д
4) Принципиальная схема включения ДПТ ПВ по системе Г-Д 29. На рис. представлена:
1) Принципиальная схема включения ДПТ ПВ по системе ВП-Д
2) Принципиальная схема включения ДПТ НВ по системе Г-Д
3) Принципиальная схема включения ДПТ НВ по системе УВ-Д
4) Принципиальная схема включения ДПТ ПВ по системе Г-Д
|
30. На рис. представлена:
 1) Сзема управления АД с короткозамкнутым ротором с динамическим торможением
2) схема управления АД с фазным ротором с торможением противовключением
3) Схема управления АД с короткозамкнутым ротором с торможением противовключением
4) Схема управления АД с фазным ротором с пуском в функции времени 1) Сзема управления АД с короткозамкнутым ротором с динамическим торможением
2) схема управления АД с фазным ротором с торможением противовключением
3) Схема управления АД с короткозамкнутым ротором с торможением противовключением
4) Схема управления АД с фазным ротором с пуском в функции времени
|
 31. На рис. представлена схема:
1) Управления пуском АД с фазным
ротором с реверсивным пускателем
2) Управление пуском СД с командоконтроллером
3) Управление пуском АД с короткозамкнутым ротором с командоконтроллером
4)Управление пуском СД с реверсивным пускателем 31. На рис. представлена схема:
1) Управления пуском АД с фазным
ротором с реверсивным пускателем
2) Управление пуском СД с командоконтроллером
3) Управление пуском АД с короткозамкнутым ротором с командоконтроллером
4)Управление пуском СД с реверсивным пускателем
|
 32. На рис. представлена схема:
1) управления АД с короткомкнутым ротором торможением противовключением
2) управления АД с фазным ротором с командоконтроллером;
3 управления АД с фазным ротором с динамическим торможением
4)управления АД с короткозамкнутым ротором с рекуперативным торможением 32. На рис. представлена схема:
1) управления АД с короткомкнутым ротором торможением противовключением
2) управления АД с фазным ротором с командоконтроллером;
3 управления АД с фазным ротором с динамическим торможением
4)управления АД с короткозамкнутым ротором с рекуперативным торможением
|
 33. На рис. представлена:
1) Структурная схема асинхронного электропривода с тиристорным регулятором напряжения
2) Структурная схема асинхронного электропривода с тиристорным регулятором скорости
3) Структурная схема асинхронного электропривода с регулированием скорости по система УВ-Д
4) Структурная схема асинхронного электропривода с регулированием скорости по системе Г-Д 33. На рис. представлена:
1) Структурная схема асинхронного электропривода с тиристорным регулятором напряжения
2) Структурная схема асинхронного электропривода с тиристорным регулятором скорости
3) Структурная схема асинхронного электропривода с регулированием скорости по система УВ-Д
4) Структурная схема асинхронного электропривода с регулированием скорости по системе Г-Д
|
 34. На рис. представлены зависимости Р, ΔР и Θ от времени для режима:
1) повторно-кратковременного с частыми пусками и электрическим торможением;
2) повторно-кратковременного;
3) кратковременного;
4) повторно-кратковременного с частыми пусками. 34. На рис. представлены зависимости Р, ΔР и Θ от времени для режима:
1) повторно-кратковременного с частыми пусками и электрическим торможением;
2) повторно-кратковременного;
3) кратковременного;
4) повторно-кратковременного с частыми пусками.
|
| 35. Пуск СД осуществляется в три этапа:
1) Подача возбуждения в обмотку ротора, разгон до синхронной скорости wо, синхронизация с сетью.
2) Разгон до синхронной скорости (wо), снижение возбуждения, синхронизация с сетью
3) Разгон до подсинхронной скорости (0,7 wо), подача возбуждения в обмотку ротора, синхронизация с сетью
4) Разгон до подсинхронной скорости (0,7 wо), снижение возбуждения, синхронизация с сетью
|
36. Условие температурной стойкости двигателя выглядит следующим образом:
1)  2) 2)  3)
3)  4) 4) 
|
| 37. Системы автоматического управления электроприводами подразделяются на:
1) разомкнутые и замкнутые;
2) простые и сложные;
3) открытые и закрытые;
4) интегральные и дифференциальные
|
| 38. Состояние САУ называется устойчивым, если:
1) отклонение от него остаётся сколь угодно малым при любых достаточно малых изменениях входных сигналов;
2) отклонение от него остаётся сколь угодно малым при постоянных входных сигналах;
3) отклонение от него остаётся сколь угодно малым при любых достаточно малых изменениях выходных сигналов;
4) отклонение от него остаётся сколь угодно малым при любых достаточно больших изменениях выходных сигналов
|
39.  это:
1) относительная продолжительность включения двигателя;
2) относительная продолжительность переходного режима;
3) относительная продолжительность включения механизма;
4) относительная продолжительность включения питания это:
1) относительная продолжительность включения двигателя;
2) относительная продолжительность переходного режима;
3) относительная продолжительность включения механизма;
4) относительная продолжительность включения питания
|
| 40. Форсировка возбуждения это:
1) быстрый подъем напряжения возбуждения от неустойчивовго Uf Н до максимально возможного установившегося Uf m.
2) быстрый подъем напряжения возбуждения от минимального Uf до максимально возможного установившегося Uf m
3) быстрый подъем напряжения возбуждения от нулевого Uf 0 до максимально возможного установившегося Uf m
4) быстрый подъем напряжения возбуждения от номинального Uf Н до максимально возможного установившегося Uf m
|
|
|

 2)
2)  3)
3)  4)
4) 
 2)
2)  3)
3)  4)
4) 
 2) β =
2) β =  3) β =
3) β =  4) β =
4) β = 
 ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4) 
 2)
2)  3)
3)  4)
4) 
 ; 2)
; 2)  ; 3)
; 3)  ; 4)
; 4) 
 14. На рис. представлена:
1) Скоростная характеристика двигателя постоянного тока с независимым возбуждением;
2) Скоростная характеристика асинхронного двигателя;
3) Механическая характеристика синхронного двигателя;
4) Механическая характеристика двигателя постоянного тока с независимым возбуждением.
14. На рис. представлена:
1) Скоростная характеристика двигателя постоянного тока с независимым возбуждением;
2) Скоростная характеристика асинхронного двигателя;
3) Механическая характеристика синхронного двигателя;
4) Механическая характеристика двигателя постоянного тока с независимым возбуждением.
 4) Иллюстрация режима динамического торможения АД
4) Иллюстрация режима динамического торможения АД
 2)
2)  3)
3)  4)
4) 
 4) нагрузочная диаграмма для режима S24
4) нагрузочная диаграмма для режима S24
 ; 2)
; 2)  ;
3)
;
3)  ; 4)
; 4)  ; 2)
; 2)  ;
3)
;
3)  ; 4)
; 4)  .
.
 26. На рис. представлена часть схемы:
1) пуска ДПТ в функции тока якоря двигателя;
2) пуска ДПТ в функции ЭДС якоря двигателя;
3) пуска ДПТ в функции мощности;
4) пуска ДПТ в функции времени.
26. На рис. представлена часть схемы:
1) пуска ДПТ в функции тока якоря двигателя;
2) пуска ДПТ в функции ЭДС якоря двигателя;
3) пуска ДПТ в функции мощности;
4) пуска ДПТ в функции времени.
 27. На рис. представлена:
1) Принципиальная схема включения ДПТ ПВ по системе ВП-Д
2) Принципиальная схема включения ДПТ НВ по системе Г-Д
3) Принципиальная схема включения ДПТ НВ по системе УВ-Д
4) Принципиальная схема включения ДПТ ПВ по системе Г-Д.
27. На рис. представлена:
1) Принципиальная схема включения ДПТ ПВ по системе ВП-Д
2) Принципиальная схема включения ДПТ НВ по системе Г-Д
3) Принципиальная схема включения ДПТ НВ по системе УВ-Д
4) Принципиальная схема включения ДПТ ПВ по системе Г-Д.
 28. На рис. представлена схема:
1) Управление пуском АД с короткозамкнутым ротором с реверсивным пускателем;
2) Управление пуском СД с командоконтроллером;
3) Управления пуском АД с фазным ротором с реверсивным пускателем;
4) Управление пуском СД с реверсивным пускателем.
28. На рис. представлена схема:
1) Управление пуском АД с короткозамкнутым ротором с реверсивным пускателем;
2) Управление пуском СД с командоконтроллером;
3) Управления пуском АД с фазным ротором с реверсивным пускателем;
4) Управление пуском СД с реверсивным пускателем.
 29. На рис. представлена:
1) Схема пуска СД без возбуждения;
2) Схема пуска АД с короткозамкнутым ротором;
3) Схема реакторного пуска СД (статорная цепь);
4) Сзема пуска АД с реверсированием.
29. На рис. представлена:
1) Схема пуска СД без возбуждения;
2) Схема пуска АД с короткозамкнутым ротором;
3) Схема реакторного пуска СД (статорная цепь);
4) Сзема пуска АД с реверсированием.
 30. На рис. представлена:
1) Структурная схема САР угловой скорости с положительной обратной связью по току;
2) Структурная схема САР угловой скорости с положительной обратной связью по скорости;
3) Структурная схема САР угловой скорости с
положительной обратной связью по напряжению;
4) Структурная схема САР угловой скорости с
отрицательной обратной связью по напряжению.
30. На рис. представлена:
1) Структурная схема САР угловой скорости с положительной обратной связью по току;
2) Структурная схема САР угловой скорости с положительной обратной связью по скорости;
3) Структурная схема САР угловой скорости с
положительной обратной связью по напряжению;
4) Структурная схема САР угловой скорости с
отрицательной обратной связью по напряжению.
 31. На рис. представлена:
1) Структурная схема контура регулирования напряжения;
2) Структурная схема контура регулирования тока;
3) Структурная схема контура регулирования возбуждения;
4) Структурная схема контура регулирования скорости.
31. На рис. представлена:
1) Структурная схема контура регулирования напряжения;
2) Структурная схема контура регулирования тока;
3) Структурная схема контура регулирования возбуждения;
4) Структурная схема контура регулирования скорости.
 3) Общая структурная схема системы электропривода
4) Общая структурная схема вентильного электродвигателя.
3) Общая структурная схема системы электропривода
4) Общая структурная схема вентильного электродвигателя.
 33. На рис. представлена:
1) Принципиальная схема торможения противовключением и реверсирования ДПТ с НВ;
2) Принципиальная схема динамического торможения ДПТ с НВ;
3) Принципиальная схема генераторного торможения и реверсирования ДПТ с ПВ;
4) Принципиальная схема пуска ДПТ с НВ.
33. На рис. представлена:
1) Принципиальная схема торможения противовключением и реверсирования ДПТ с НВ;
2) Принципиальная схема динамического торможения ДПТ с НВ;
3) Принципиальная схема генераторного торможения и реверсирования ДПТ с ПВ;
4) Принципиальная схема пуска ДПТ с НВ.
 4) Принципиальная схема пуска СД с глухоподключенным возбудителем;
4) Принципиальная схема пуска СД с глухоподключенным возбудителем;
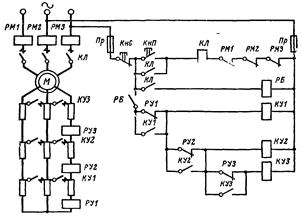
 36. На рис. представлена схема:
1) Управления реверсивным АД с фазным ротором с торможением в функции ЭДС;
2) Управления реверсивным АД с фазным ротором с динамическим торможением;
3) Управления реверсивным АД с фазным ротором с торможением в функции тока;
4) Кнопочного управления реверсивным АД с фазным ротором.
36. На рис. представлена схема:
1) Управления реверсивным АД с фазным ротором с торможением в функции ЭДС;
2) Управления реверсивным АД с фазным ротором с динамическим торможением;
3) Управления реверсивным АД с фазным ротором с торможением в функции тока;
4) Кнопочного управления реверсивным АД с фазным ротором.
 37. На рис. представлена:
1) Структурная схема САР угловой скорости
с отрицательной обратной связью по скорости;
2) Структурная схема САР угловой скорости с отрицательной обратной связью по напряжению;
3) Структурная схема САР угловой скорости с отрицательно обратной связью по току;
4) Структурная схема САР угловой скорости с положительной обратной связью по току;
37. На рис. представлена:
1) Структурная схема САР угловой скорости
с отрицательной обратной связью по скорости;
2) Структурная схема САР угловой скорости с отрицательной обратной связью по напряжению;
3) Структурная схема САР угловой скорости с отрицательно обратной связью по току;
4) Структурная схема САР угловой скорости с положительной обратной связью по току;
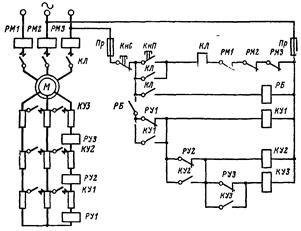
 38. На рис. представлена схема:
1) управления АД с фазным ротором с командоконтроллером;
2) управления АД с короткомкнутым ротором торможением противовключением;
3) управления АД с короткозамкнутым ротором с рекуперативным торможением;
4) управления АД с фазным ротором с динамическим торможением.
38. На рис. представлена схема:
1) управления АД с фазным ротором с командоконтроллером;
2) управления АД с короткомкнутым ротором торможением противовключением;
3) управления АД с короткозамкнутым ротором с рекуперативным торможением;
4) управления АД с фазным ротором с динамическим торможением.



