Датчик угла
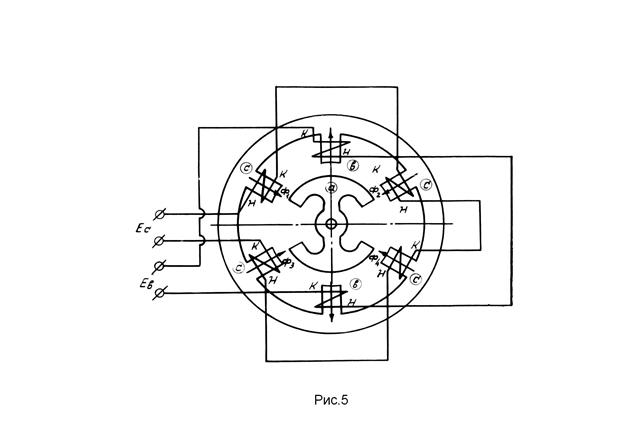
Датчик угла предназначен для определения углового перемещения поплавка относительно корпуса ДУС-Л7А, и преобразования этого перемещения в электрический сигнал. В качестве датчика угла в ДУС-Л7А применен индукционный датчик трансформаторного типа, принцип действия которого заключается в следующем. В первоначальном положении поплавка (при отсутствии угловой скорости объекта) якорь датчика угла «а» (рис.5) находится в среднем положении относительно нейтрали статора датчика угла. В этом положении магнитные потоки Ф1, Ф2 и Ф3, Ф4, создаваемые катушками возбуждения «в» в сердечниках сигнальных катушек «с», равны по величине и направлены так, как указано на рис. 7. Сигнальные катушки «с» электрически соединены так (рис. 7), что индуктированные в них ЭДС Е1, Е2, и Е3, Е4 противоположны по фазе. Вследствие равенства магнитных потоков и противоположности фаз ЭДС сигнальных катушек, суммарная ЭДС 4-х последовательно соединенных катушек близка к нулю (Ес=0). Наличие некоторого «нулевого» выходного сигнала при данном положении якоря, объясняется практической трудностью выполнения датчика с полной геометрической, электрической, магнитной симметриями. При отклонении поплавка от первоначального положения в ту или иную сторону в результате воздействия на прибор угловой скорости якорь датчика угла смещается относительно магнитной нейтрали статора датчика угла, нарушая равенство площадей перекрытия якорем стержней сигнальных катушек. Вследствие этого изменяется сопротивление магнитных цепей датчика угла, вызывая перераспределение магнитных потоков Ф1,Ф2,Ф3,Ф4. Перераспределение магнитных потоков, в свою очередь, приводит к изменению величины и фазы суммарной ЭДС, индуктированной в сигнальных катушках. Таким образом, при изменении величины и направления углового смещения якоря датчика угла от нейтрального положения датчик угла выдает сигнал в виде ЭДС сигнальных катушек, амплитуда и фаза которой соответствует угловому перемещению якоря датчика угла (поплавка). Основными конструктивными элементами датчика угла являются: статор индукционного датчика и якорь. Индукционный датчик (рис. 6) состоит из пакета статора 1, набранного из пластин листового низконикелевого пермаллоя и установленного в обойму 2. На шести диаметрально противоположных стержнях пакета закреплены катушки 3, имеющие одинаковое омическое сопротивление и число витков. Пакет статора с катушками установлен в основание 4 и закреплен гайкой 5. Якорь датчика представляет собой пакет пластин специальной формы из низконикелевого пермаллоя 8. Якорь устанавливается и приклеивается эпоксидным компаундом на оси поплавка. Установка датчика угла в нулевое положение, при котором выходной сигнал датчика угла минимален, но не более 30мВ, осуществляется угловым перемещением статора индукционного датчика относительно поплавка, после чего статор индукционного датчика закрепляется в корпусе 9 ДУС-Л7А накидной гайкой 12. Датчик угла расположен на левом торце поплавка.
|