
Принцип действия и устройство навигационных эхолотов
Среди средств наблюдения, связи и управления в подводной среде особое место занимают гидроакустические станции (ГАС) активного действия, к которым, в частности, относятся навигационные эхолоты и гидролокаторы. Навигационный эхолот предназначен для измерения глубин под килем судна-носителя, а гидролокатор — для определения трех координат подводного объекта, находящегося в стороне от судна-носителя: дистанции Д, истинного пеленга (курсового угла) и угла цели θ (угла в вертикальной плоскости). Измерение дистанции. Принцип измерения дистанции до подводного объекта с помощью эхолота или гидролокатора заключается в измерении промежутка времени между посылкой зондирующего импульса в толщу воды и приходом отраженного от объекта (препятствия) эхо-сигнала к приемнику. Зная скорость распространения звука в воде, можно определить дистанцию до подводного объекта по формуле
где с0 — расчетное значение скорости звука в воде (1500 м/с). Таким образом, задача об определении глубины под килем или дистанции до подводного объекта сводится к измерению весьма малого промежутка времени Δt. Конструктивно она может быть решена различными методами с применением в качестве индикаторных устройств электромеханических указателей глубин, самописцев и цифровых электронных указателей глубин. Электромеханические указатели глубин предназначаются для визуального отсчета глубин и управления посылками акустических импульсов. Они используются только в эхолотах. Указатель глубин с механической линейной разверткой времени (рис. 3.25) состоит из вращающейся планки 1 с неоновой лампочкой 2, трансформатора T, кулачков 3 с контактами S1 и S2, электродвигателя 5, коробки скоростей 4 и шкалы, разбитой в единицах глубины. Эхолот с электромеханическим указателем глубины работает следующим образом. Электродвигатель 5 вращает с постоянной частотой вращения планку 1 с неоновой лампочкой 2 и кулачком 3. В момент прохождения неоновой лампочкой нулевого деления шкалы кулачок 3 размыкает контакт S1, при этом разрывается цепь питания обмотки посылочного реле 6 и его контакты S3 замыкаются под действием пружины 7. Конденсатор С разряжается через обмотку вибратора-излучателя ВИ. При этом образуется колебательный контур, в котором возникают мощные затухающие колебания, и электромеханический преобразователь излучает в воду ультразвуковой импульс большой интенсивности. Зондирующий импульс в основном максимуме диаграммы направленности распространяется ко дну, а в боковом — к вибратору-приемнику ВП. Боковой акустический импульс в вибраторе-приемнике преобразуется в слабый электрический сигнал, который после усиления поступает на первичную обмотку трансформатора T. Со вторичной обмотки трансформатора напряжение подается на неоновую лампочку 2, Вспышка ламп очки практически совпадает с нулем шкалы.
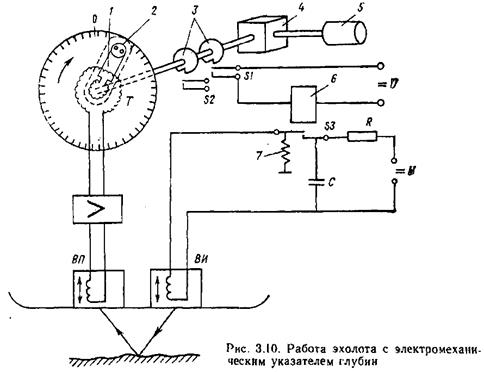
Зондирующий импульс в пределах основного максимума диаграммы направленности доходит до дна, отражается и принимается вибратором-приемником ВП, Слабая э. д. с, возникающая й обмотке вибратора, после усиления заставит вспыхнуть неоновую лампочку против деления шкалы, соответствующего измеряемой глубине. При следующем обороте планки рассмотренный процесс повторится. Из-за быстрого вращения планки с неоновой лампочкой нулевые вспышки и отметки глубин сливаются, и по шкале можно непрерывно отсчитывать глубину под килем судна. Применение неоновой лампочки вызвано тем, что она практически безынерционна, т. е. мгновенно зажигается при подаче напряжения и мгновенно гаснет при отсутствии его; это обеспечивает точный отсчет глубин по шкале. Частота вращения неоновой лампочки должна быть строго постоянной для данного диапазона глубин; это поддерживается с помощью автоматического регулятора частоты вращения электродвигателя. При регистрации малых глубин необходимо «гасить» нулевую отметку. Это вызвано тем, что накопительный конденсатор разряжается на нулевой отметке, а для фиксации глубины под килем зарядиться не успевает. Схема гашения нулевой отметки действует от контактов S2, которые в момент, соответствующий посылке импульса, отключают накопительный конденсатор от цепи разряда. После прохождения неоновой лампочкой нулевой отметки шкалы схема разряда восстанавливается и импульсы, отраженные даже с малых глубин, отмечаются указателем эхолота. Самописцы предназначены для автоматической записи измеряемых глубин. В настоящее время наибольшее распространение получают самописцы с линейной механической разверткой в виде бесконечной ленты с закрепленными на ней пером и кулачком (рис. 3.26). Электропривод заставляет перо двигаться с постоянной скоростью по электротермической бумаге. В момент прохождения пером нулевого деления шкалы посылочные контакты срабатывают и подключают импульсный генератор к обмотке вибратора-излучателя, который посылает в воду зондирующий импульс. К моменту возвращения эхо-сигнала от подводного объекта перо перемещается вдоль шкалы на некоторое расстояние, прямо пропорциональное глубине (дистанции). Усиленный электрический сигнал прожигает бумагу, регистрируя отметку глубины. Принцип фиксации нулевой отметки и гашения в самописце такой же, как и в электромеханическом указателе глубин.
Шкалы индикаторов рассчитывают на определенные глубины и дистанции. Масштаб шкалы определяется пределами значений измеряемых величин, а также шириной бумажной ленты самописца. В индикаторах обычно предусматривается несколько диапазонов, измерение на которых начинается с нуля, и поддиапазон, на котором «просматривается» слой воды с определенной глубины. Цифровой указатель глубин (ЦУГ) применяют при электронном методе измерения промежутка времени между посылкой и приемом сигнала. ЦУГ состоит из преобразователя типа «время – цифра» (ПВЦ) и цифрового табло. Преобразователь «время – цифра» преобразует промежуток времени в прямо пропорциональное число импульсов, соответствующее глубине. Структурная схема ЦУГ приведена на рис. 3.27. Генератор счетных импульсов ГСИ вырабатывает счетные импульсы с частотой повторения fп = 7500 Гц, которые поступают на вход схемы совпадения СС. Период следования, а значит, и цена одного счетного импульса соответствуют глубине
В момент излучения блок посылок БП вырабатывает импульс посылки, который поступает к задающему генератору ЗГ и триггеру управления ТУ. Последний сбрасывает счетные декады СД с цифрового табло в нулевое положение. Одновременно триггер управления выдает на схему совпадения разрешающий сигнал, и с этого момента счетные импульсы начинают поступать на счетную декаду десятых долей (0,1).
Рис. 3.28. Работа эхолота с цифровым указателем глубин
Задающий генератор вырабатывает мощный импульс, а вибратор-излучатель осуществляет посылку. Счетные декады подсчитывают счетные импульсы до тех пор, пока отраженный ото дна эхо-сигнал не попадет на вибратор-приемник и после усиления не поступит в триггер управления. Последний снимает разрешающий сигнал со схемы совпадения, и счет импульсов прекращается. Одновременно импульс триггера управления включает цифровое табло, и подсчитанный счетными декадами результат подается через дешифратор на цифровое табло ЦТ.
3.2.3 Лаги Лаги предназначены для измерения скорости судна относительно поверхности воды. В зависимости от принципа действия, лаги делятся на три вида: гидроакустические, индукционные и гидродинамические. На рис. 3.28 изображен гидродинамический лаг.
Рис. 3.29. Гидродинамический лаг: 1 – основной блок; 2 – стрелочный указатель скорости; 3 – соединительный кабель; 4 – штепсельный разъем; 5 – цифровой указатель скорости и расстояния; 6 – приемная трубка лага; 7 – приемный клапан; 8 – маховик приемного клапана
|
 (3.5)
(3.5)






