Принципиальная электрическая схема
В режиме корректируемого гирокомпаса главная ось прибора при движении судна с постоянной скоростью и неизменным курсом располагается вдоль полуденной линии N – S и указывает плоскость истинного меридиана. В режиме гироазимута главная ось прибора в течение некоторого интервала времени сохраняет то азимутальное направление, которое указывал гироскоп при переключении его с режима гирокомпаса на режим гироазимута. Чувствительным элементом гироазимуткомпаса является гиросфера 1 (рис. 3.21).3.4 Внутри гиросферы размещен один гироскоп 2. Кинетический момент Н гироскопа направлен по горизонтальной оси ОХ чувствительного элемента. Центр тяжести ЧЭ совпадает с его геометрическим центром. Таким образом, чувствительный элемент является астатическим. Гиросфера размещена внутри следящей сферы (корпуса гироблока) 5. Пространство между следящей сферой и чувствительным элементом заполнено поддерживающей жидкостью 4. При рабочей температуре чувствительный элемент имеет нейтральную плавучесть. Относительно следящей сферы гиросфера центрируется с помощью двух пар торсионов и промежуточного кольца 3. Вертикальные торсионы 6 одним концом закреплены в следящей сфере 5, а другим — в кольце 3. Горизонтальные торсионы 7 одним концом прикреплены к гиросфере 1, а другим – к кольцу 3. Следящая сфера 5 вместе с установочным кольцом 17 обладает положительной маятниковостью. Цапфами 15 следящая сфера покоится в подшипниках внутреннего кольца 8 карданова подвеса. Наружное кольцо 11 этого подвеса посажено цапфой в подшипник 14 корпуса прибора. Таким образом, весь гироблок (чувствительный элемент и следящая сфера) имеет три степени свободы. Следящая система гироблока осуществляет слежение за положением чувствительного элемента по азимуту и высоте, обеспечивая сохранение им свойств свободного гироскопа, и является основой для реализации трехстепенного жидкостно-торсионного подвеса гиросферы. Следящая система гироблока имеет два канала. Азимутальный канал отрабатывает поворот судна относительно оси ОZ чувствительного элемента, а горизонтный канал служит для отработки поворота судна вокруг оси ОУ гиросферы. Положение гироскопа относительно горизонтной сисю мы координат определяется углами α и β, а положение следящей сферы относительно горизонтной системы координат — углами αc и βc. Углы рассогласования сфер по азимуту α – αс и по высоте β – βс измеряются датчиком угла 16. Сигналы на выходе датчика угла обозначены Uα и Uβ соответственно. Сигнал Uβ через сумматор I, усилитель А1 подается на стабилизирующий двигатель 10. Через редуктор 9 двигатель 10 поворачивает внутреннее кольцо 8, а вместе с ним и следящую сферу 5 вокруг горизонтальной оси до тех пор, пока угол β – βс не станет равным нулю.
Таким образом, любой поворот судна как вокруг вертикальной оси, так и вокруг горизонтальной оси, перпендикулярной кинетическому моменту гироскопа, тотчас же отрабатывается стабилизирующими двигателями 10 и 12, а следящая сфера 5 сохраняет согласованное положение с гиросферой 1. Чувствительный элемент при описанном режиме работы следящей системы, когда углы α – αс и β – βс отрабатываются до нуля и торсионы 6 и 7 остаются незакрученными, обладает свойством свободного гироскопа. Начальная ориентация и последующая стабилизация следящей сферы относительно главной оси гироскопа обеспечиваются маятниковостью самой следящей сферы. Для превращения свободного гироскопа в чувствительный элемент гироазимуткомпаса применена система косвенного управления. (СКУ). В зависимости от режима работы прибора эта система превращает свободный гироскоп в чувствительный элемент либо гирокомпаса, либо гироазимута. Основная особенность работы системы косвенного управления состоит в том, что она воздействует на гиросферу через каналы следящей системы гироблока. Наложение управляющих моментов осуществляется через торсионы при помощи следящих приводов. Известно, что для превращения свободного гироскопа в гирокомпас необходимо и достаточно наложить относительно горизонтальной оси ОУ гироскопа управляющий момент, пропорциональный углу р. Для демпфирования собственных колебаний гирокомпаса достаточно наложить момент, пропорциональный углу р, относительно оси ОZ гироскопа. Рассмотрим, каким образом осуществляется реализация этих моментов в гироазимуткомпасе «Вега» (см. рис. 3.21). Система косвенного управления имеет два канала. К азимутальному каналу управления относятся индикатор горизонта 18, масштабирующий элемент M1, усилитель А1, двигатель 10 и горизонтальные торсионы 7. Азимутальный канал функционирует, если переключатель SA режимов работы находится в положении ГК (гирокомпас). Горизонтный канал управления образован индикатором горизонта 18, масштабирующими элементами M1 и М2, усилителем А2, двигателем 12 и вертикальными торсионами 6. Сначала рассмотрим работу системы косвенного управления при функционировании прибора в режиме гирокомпаса. Индикатор горизонта ИГ, представляющий собой плоский физический маятник, укреплен на следящей сфере. Его ось чувствительности параллельна главной оси гироскопа, поэтому он реагирует на изменение угла βс наклона следящей сферы. Сигнал Uc на выходе индикатора горизонта пропорционален углу βс: Uc = kигβс где kИГ — крутизна характеристики индикатора горизонта. В режиме гирокомпаса переключатель SA находится в положении ГК (включено), поэтому сигнал индикатора горизонта на сумматорах I и II достигает значений Ucl = kигm1βс; Uc2 = kигm1m2βс, где m1 и m2 – передаточные коэффициенты масштабирующих элементов M1 и М2, При наличии сигналов Ucl и Uc2 двигатели M1 и М2 работают до тех пор, пока разности сигналов Uβ и Uс1, а также Uα и Uc2 не обратятся в нуль, т. е. пока не будут выполнены условия Uβ – Uс1 = 0; Uα – Uc2 = 0
При этом углы α – αс и β – βс между гиросферой и следящей сферой отличны от нуля и на гиросферу действуют моменты торсионов Lг = cг(β – βс); Lв = св(α – αс).
В этих формулах параметры сг и св выражаются в тех же единицах физических величин, что и моменты, и определяются жесткостью соответственно горизонтального и вертикального торсионов.
Раскроем сущность разностей углов α – αс и β – βс.
Для этого представим формулы Uβ – Uс1 = 0; Uα – Uc2 = 0 следующим образом:
kд(α – αс) – kигm1m2βc = 0; kд(β – βс) – kигm1βc = 0
После несложных преобразований получим выражения α – αс = m2nиг β; β – βс = nигβ,
где nиг — приведенный коэффициент передачи индикатора горизонта;
Из полученных формул следует, что разности α – αс и β – βс пропорциональны углу β подъема главной оси гироскопа над плоскостью горизонта, следовательно, моменты торсионов Lг = сгnигβ; Lв = свm2nигβ.
При действии на свободный гироскоп двух моментов, значения которых пропорциональны углу β, он превращается в чувствительный элемент гирокомпаса. В режиме гироазимута переключатель SA находится в положении ГА (положение «Выключено»). Как следует из схемы, в системе косвенного управления функционирует только один горизонтный канал, благодаря которому главная ось гиросферы удерживается в горизонтальном положении. Азимутальный канал управления отключается. Для коррекции погрешностей гирокомпаса при стационарном движении судна в блоке коррекции вырабатываются корректирующие сигналы UK1 и UK1, которые подаются в соответствующие каналы управления, где суммируются с управляющими сигналами UC1 и UC2. Наличие этих сигналов приводит в конечном счете к дополнительному закручиванию вертикальных торсионов, которое обеспечивает компенсацию скоростной погрешности в показаниях гирокомпаса. Дополнительное закручивание горизонтальных торсионов нивелирует главную ось гирокомпаса, вследствие чего устраняет девиацию затухания. В общем случае к гирокомпасу подключают до 8 приемников курса, которые называются указателями курса (или репитерами гирокомпаса). Указатели расположены в таких судовых помещениях: 1. на навигационном мостике, встроен в верхнюю часть блока авторулевого, для контроля курса судна вахтенным помощником или капитаном (лоцманом); 2. в штурманской рубке – чтобы вахтенный помощник, контролировал курс судна, не выходя из рубки (например, при работе с картой – на судах старой постройки). 3. в пеленгаторах на левом и правом крыльях мостика (пеленг – голл. pieling, то же, что и азимут – направление на наблюдаемый объект – судно, маяк и пр. и диаметральной плоскостью судна); 4. в рабочем кабинете (салоне) капитана – чтобы капитан, не выходя из своей каюты, контролировал курс судна и др. Кроме того, один из репитеров встраивается внутрь блока авторулевого и обеспечивает, при помощи рулевого устройства, автоматическое удержание судна на заданном курсе. На судах старой постройки судоводители определяли курс по подвижной картушке (шкале) грубого отсчета с ценой деления 1º. Для более точного отсчета использовалась картушка точного отсчета с ценой деления 0,1º. Отсюда следует, что на старых судах для получения отсчета требовался определенный навык. На современных судах, в дополнению к отсчету по картушкам, используется цифровой отсчет курса на экранах (дисплеях) на жидких кристалах (рис. 3.22).
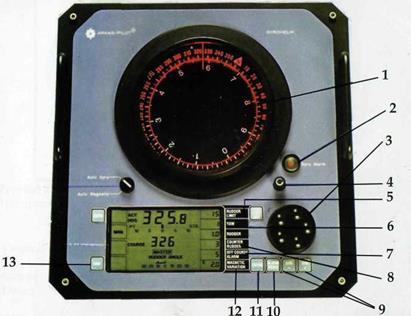
Рис. 3.23. Верхняя часть (панель) блока управления авторулевым: 1 – картушки гирокомпаса – грубого отсчета (наружная) и точного отсчета (внутренняя); 2 – световой сигнал отклонения судна от курса (дублируется звуковым – трещоткой внутри этого блока управления); 3 – ручка вращения картушек гирокомпаса (для согласования показаний основного прибора гирокомпаса и его репитеров перед каждым выходом судна в рейс – 4-й помощник); 4 – регулятор (потенциометр) яркости подсветки картушек компаса (чтобы в темное время суток не ослеплять вахту на мостике); 5 – указатель настройки ограничителей поворота пера руля – на дисплее слева – 15º (по Правилам Регистра – не более 32-23º); 6 – лимб (круглая рукоятка) настройки срабатывания сигнализации о недопустимо большом уходе судна с курса при работе рулевого устройства на «автомате» – на дисплее – 1º(обычно от 3º до 9º); 7 – указатель угла поворота пера руля в момент срабатывания сигнализации (см. п. 6) – на шкале – 5º; 8 – указатель отклонения пера руля в обычном режиме движения судна (рулевой аксиометр) – на шкале 3º; 9 – кнопки «Больше» и «Меньше» настройки яркости жидкокристаллического экрана (зеленого цвета); 10 – кнопка переустановки сигнализации о недопустимом отклонении судна от курса; 11 – кнопка ввода данных; 12 – указатель магнитного склонения в месте нахождения судна; 13 – переключение согласования авторулевого с гирокомпасом или магнитным компасом
|