
Гидроакустические доплеровские лаги
В 1842 г. австрийский физик и астроном К. Доплер теоретически обосновал зависимость изменения частоты колебаний или длины волны, воспринимаемой наблюдателем, от скорости источника колебаний и наблюдателя при движении относительно друг друга. Это явление получило название эффекта Доплера. Эффект Доплера для звуковых волн может наблюдаться непосредственно. Он проявляется в повышении тона звука, когда источник звука и наблюдатель сближаются, и соответственно в понижении тона звука, когда они удаляются. Принцип действия гидроакустического лага, основанного на эффекте Доплера и применяемого для измерения скорости судна относительно грунта (дна), заключается в следующем. Пусть в днище судна установлена антенна А (рис.3.32), действующая как излучатель и приемник ультразвуковых колебаний. В сторону дна излучаются ультразвуковые волны частотой f0 в виде узкого пучка под углом θ1 к плоскости горизонта. Считаем для простоты, что угол дифферента судна равен нулю, вектор скорости судна совпадает с курсом, а вертикальных перемещений судна нет.
Длина волны ультразвуковых колебаний λ в воде, излученных с движущегося судна,
где W — результирующая скорость удаления излученной волны от судна в направлении звукового луча.
В нашем случае скорость W определяется скоростью звука с и проекцией вектора скорости Vc судна на направление излучения: W = с - Vccosθ1.
Тогда
В силу неровностей рельефа дна звуковая волна рассеивается во все стороны, в том числе и в направлении антенны. Таким образом, от дна будет получен эхо-сигнал с длиной волны λ. Скорость приближения эхо-сигнала W’ = с + Vccosθ2 (3.9)
В результате частота принятых колебаний с учетом уравнений (4.8) и (4.9) может быть представлена в виде
или
Разложив второй сомножитель правой части в степенной ряд, получим
Пренебрегая квадратичными и последующими членами разложения и принимая θ1 = θ2 = θ, получим
Определим разность частот эхо-сигнала, пришедшего на антенну ото дна, и излученного сигнала:
Из формулы ясно, что при пренебрежении членами второго порядка малости зависимость доплеровского приращения частот fД от скорости судна носит линейный характер. Практическая реализация однолучевого доплеровского лага связана с рядом трудностей, основными из которых являются нелинейность зависимости fд от Vс, изменение угла θ при крене, дифференте и на качке, влияние вертикальной составляющей скорости судна на измеряемый сигнал.
На практике нашли применение двухлучевые доплеровские системы, в которых ультразвуковая волна излучается вдоль диаметральной плоскости судна в сторону носа и кормы под одним и тем же углом в (рис. 3.32).
где f1 и f2 – частоты принятых сигналов со стороны соответственно носа и кормы судна. Доплеровский сдвиг частот между эхо-сигналами от носового и кормового излучений в этом случае
Тогда
Двухлучевая доплеровская система позволяет устранить недостатки, присущие однолучевому доплеровскому лагу.
Для определения не только продольной, но и поперечной составляющей скорости судна применяют трех-, четырех- или даже шестилучевые доплеровские системы (рис. 3.34). Шестилучевые доплеровские системы, устанавливаемые на крупнотоннажных судах, предназначены не только для навигационных целей, но и для измерения небольших по значению поперечных составляющих скорости носовой и кормовой оконечностей судна, что важно при выполнении швартовных операций. В качестве примера можно привести отечественные шести- и четырех лучевую доплеровские системы «Онега» и Ла-3. Рассмотрим обобщенную структурную схему доплеровского гидроакустического лага (рис. 3.35).
Усилители блока ППБ состоят из предварительных и основных. Предварительные усилители устанавливают в непосредственной близости от антенны, они служат для усиления сигналов для передачи их по длинному кабелю, соединяющему антенну и блок БВДЧ. Основной усилитель выполняет стандартные функции усиления сигналов до уровня, достаточного для нормальной работы блока БВДЧ. В его состав, как правило, входит схема автоматической регулировки усиления. Коммутаторы блока ППБ во время излучения подключают преобразователи антенны к генератору, а во время приема — к предварительным усилителям, а также служат для электрической развязки входов усилителей и выхода генератора. В схему доплеровского лага могут включаться также корректирующие устройства КУ, автоматически и полуавтоматически вводящие поправки в измеряемую скорость судна на изменение скорости звука. Как следует из выражения (3.12), источниками погрешности доплеровского лага могут быть: погрешности изменения средней частоты fд доплеровского спектра; изменение скорости с звука в воде; изменение угла θ наклона лучей антенной системы; изменение несущей частоты f0 акустического излучения. Необходимость выделения средней частоты доплеровского спектра вызвана тем, что акустические колебания распространяются не в виде луча, а в пределах определенного телесного угла. Ширина спектра доплеровского сигнала однозначно определяется шириной диаграммы направленности антенны. Чем шире спектр доплеровского сигнала, тем больше флуктуация средней частоты этого спектра, что приводит к уменьшению точности измерения скорости судна. В связи с этим возникает необходимость сужения акустического пучка либо повышением несущей частоты зондирующего сигнала, либо увеличением геометрических размеров приемно-излучающей поверхности антенны. Повышение частоты излучаемого сигнала отрицательно отражается на дальности его распространения, что приводит к уменьшению глубин возможного измерения скорости судна относительно грунта из-за повышения пространственного затухания звука в воде и снижения коэффициента отражения. Увеличивать же линейные размеры антенн можно, очевидно, лишь до разумных пределов. Следует учитывать и то, что сужение акустического пучка затрудняет прием отраженных сигналов во время качки судна. В существующих конструкциях доплеровских лагов используют акустические антенны с диаграммой направленности в пределах ψ = 3 ÷ 6°. При выборе угла наклона акустических лучей приходится сталкиваться с двумя противоречивыми факторами. С одной стороны, чем ближе угол наклона к 90° (от плоскости горизонта), тем больше амплитуда принятого сигнала в результате улучшения условий отражения ото дна и уменьшения пути его распространения, но, с другой стороны, приращение доплеровской частоты снижается на каждый узел скорости судна (снижается чувствительность лага). Таким образом, энергетические и геометрические соотношения доплеровского лага взаимосвязаны. На практике углы наклона акустических лучей выбирают чаще всего равными 60°. Рабочие глубины абсолютных доплеровских лагов находятся в пределах 200—300 м. При плавании на больших глубинах некоторые системы лагов можно переводить вручную или автоматически на работу в относительном режиме. В этом случае акустическим эхо-сигналом является объемная реверберация. Погрешность, вызванная изменением скорости звука в морской воде, может достигать 4 %, поэтому в большинстве конструкций лагов приняты меры по компенсации или учету погрешности. Коррекция выполняется вручную или автоматически по двум параметрам: температуре воды в районе антенны и ее солености.Точность показаний доплеровских лагов в абсолютном режиме довольно высока и при углах крена, дифферента, качки, не превышающих 2–3°, суммарная погрешность составляет от 0,1 до 3%.
3.2.4. Радары Радар (англ. radar, сокращение от radio detecting and ranging – радиообнаружение и определение дальности) или, иначе, радиолокационная станция – устройство, предназначенное для определения расстояния до движущихся или неподвижных объектов. У движущихся объектов, например, РЛС позволяет, помимо расстояния до них, дополнительно определить пеленг на них, а также их курс и скорость движения.
Рис. 3.36. Радиолокатор для больших судов: 1 – основной прибор; 2 – экран радиолокатора»; 3 – металлический кожух; 4 – центр развертки (положение судна); 5 – буквенно-цифровая информация о параметрах цели: пеленг, дальность, курс, скорость; 6 – регулировка яркости изображения; 7 – регулировка цветности изображения; 8 – шаровой манипулятор (для управления движением курсора); 9 – шкала дальности; 10 – отключение подвижного визира дальности; 11 – соединительный кабель; 12 – плавкие предохранители; 12-А – выбор функции управления; 13 – устранение помех от дождя, снега; 14 – устранение помех от поверхности моря; 15 – настройка; 16 – регулятор усиления; 17 – отключение электронного визира направления; 18 – рукоятка вращения электронного визира направления; 19 – подключение компаса; 20 – переключатель работа/ждущий режим (stand by); 21 – панель управления; 22 – электронный визир направления (пеленга); 23 – положение цели (объекта); 24 – градусная круговая шкала; 25 – отметка режима излучения (посылки сигнала) ТХ; 26 – шкала дальности; 27 – антенна РЛС
|

 ,
, (3.8)
(3.8)



 (3.10)
(3.10)
 Частота работы излучателей в обоих каналах одинакова и строго фиксирована. Приемники акустической системы принимают сигналы следующих частот:
Частота работы излучателей в обоих каналах одинакова и строго фиксирована. Приемники акустической системы принимают сигналы следующих частот:
 (311)
(311) . (3.12)
. (3.12)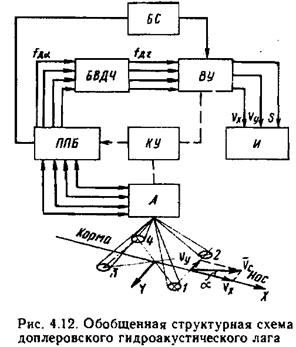
 ,
,  ,
,  , и
, и  с выхода блока ППБ поступают в блок выделения доплеровских частот БВДЧ, где определяются разности частот излученных и принятых сигналов по каждому лучу. В вычислительном устройстве ВУ доплеровские частоты
с выхода блока ППБ поступают в блок выделения доплеровских частот БВДЧ, где определяются разности частот излученных и принятых сигналов по каждому лучу. В вычислительном устройстве ВУ доплеровские частоты  ,
,  ,
,  и
и  прямо пропорциональные соответствующим составляющим абсолютной скорости судна, преобразуются в информацию о продольной, поперечной скоростях судна (или в информацию о модуле скорости и об угле сноса) и пройденном расстоянии, которая подается затем на индикаторы И и внешним потребителям. Блок синхронизации БС (схема блокирования) управляет работой лага в целом.
прямо пропорциональные соответствующим составляющим абсолютной скорости судна, преобразуются в информацию о продольной, поперечной скоростях судна (или в информацию о модуле скорости и об угле сноса) и пройденном расстоянии, которая подается затем на индикаторы И и внешним потребителям. Блок синхронизации БС (схема блокирования) управляет работой лага в целом.



