Разрывной машины МР-0,5-1 и правила работы на ней
Разрывная машина типа МР-0,5-1 имеет механический привод и рычажно-маятниковое силоизмерительное устройство (рис.2). 1. Наибольшая нагрузка при испытании, Н - 5 000 2. Предельное значение шкалы нагрузки, Н: шкала А - 5 000 шкала Б - 2 500 шкала В - 1 000 3. Цена деления шкалы, Н: шкала А - 10 шкала Б - 5 шкала В - 2 4. Погрешность показаний нагрузки от измеренной величины, % - ±1 5. Предельное значение шкалы деформации, мм - 200 6. Цена деления шкалы деформации, мм - 1 7. Погрешность измерения деформации по шкале, мм - ±1 8. Масштаб записи на диаграмме: нагрузки – 1 мм по шкале А, Н - 25 “ - ” - ” – Б, Н - 12,5 “ - ” - ” – В, Н - 5 деформации - 1:1 - 5:1 9. Погрешность записи нагрузки от номинального значения высоты ординаты на диаграмме, % - ±1 10. Погрешность записи деформации от действительной величины, %: до 25 мм - ±0,5 св.25 мм - ±2 11. Пределы изменения скорости перемещения нижнего захвата, мм/мин - 2 - 80
Рис.2. Внешний вид разрывной машины типа МР-0,5-1 К основным частям машины относятся остов, привод, силоизмеритель, рычажная головка и захваты (рис. 3).
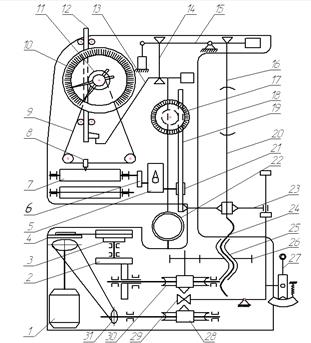
Рис.3. Схема разрывной машины
Образец 18 устанавливается в захваты 16 и 20 и подвергается растяжению за счет перемещения нижнего захвата 20 от ходового винта 24, находящегося в паре с гайкой 25. Рабочий ход винта осуществляется вращением гайки от электродвигателя 1 через трехручьевой шкив 4, двухручьевой шкив 3, лобовой вариатор 2, червячную пару 30 и зубчатую пару 26. Обратный ход винта происходит после перемещения зубчатой муфты 29 с помощью ручного переключателя 27 за счет червячной пары 28 и шкива 31 от трехручьевого шкива 4. Измерение испытательной нагрузки на образец от нижнего захвата производится с помощью верхнего захвата и рычага 15, который, поворачиваясь в шарнире, поднимает через тягу 14 рычаг 13 маятника 22 и отклоняет его в сторону. Одновременно рычаг 13 поднимает зубчатую рейку 12, которая вращает шестеренку 11 вместе с рабочей стрелкой, показывающей по шкале 10 величину нагрузки на образец. Наибольшая нагрузка на образец определяется по контрольной стрелке Наибольшее конечное удлинение образца фиксируется по делениям поворотной шкалы деформаций 17, приводимой во вращение через ее шестерню от зубчатой рейки 19, соединенной с кронштейном 23 нижнего захвата. Измерение нагрузок и удлинений образца, изменявшихся в ходе испытания, производятся по диаграмме растяжения, которая автоматически записывается на ленте диаграммного аппарата 7. Изменение нагрузки записывается пером каретки 8 при ее перемещении тросиком 9 от шкива на оси рабочей стрелки. Удлинение образца регистрируется благодаря движению диаграммной ленты при вращении барабана 7 от зубчатой пары 6, редуктора масштабов 5, шестерни 21 и рейки 19. Перед началом испытания на штангу устанавливается маятник, по весу соответствующий величине ожидаемой нагрузки разрушения образца. Вес маятника должен составлять от 10 до 90 % предельного значения выбранной шкалы нагрузок. Затем проверяется точность работы механизма рабочей стрелки: она должна совпадать с нулевым делением шкалы до приложения нагрузки и возвращаться на нуль после приложения и снятия проверочной нагрузки. По окончании проверки контрольная стрелка вручную совмещается с нулевым положением рабочей стрелки. Образец закрепляется в захват, и с помощью ручного привода ему сообщается нагрузка величиной до 5% от предельного значения выбранной шкалы нагрузок. После этого шкала устанавливается нулевым делением против рабочей стрелки, а нуль шкалы деформации 17 – против указателя корректирующего устройства, который должен быть повернут вправо до упора. Рулон бумаги закрепляется в диаграммном аппарате, скорость движения бумаги от ведущего барабана определяет масштаб записи деформаций и устанавливается с помощью редуктора масштабов в соответствии с ожидаемой величиной наибольшего удлинения образца. Скорость перемещения нижнего захвата для образцов большинства металлов и пластмасс должна быть в пределах от 6 до 25 мм/мин. Ее величина обеспечивается определенным положением ремня между шкивами 3 и 4, установкой сменных шестерен 26 и с помощью лобового вариатора 2. После выполнения описанной подготовки машина включается в работу нажатием кнопки «Пуск». Когда происходит разрушение образца, электропривод машины автоматически выключается, и маятник плавно опускается в исходное положение благодаря действию гидравлического демпфера.
|