Проектирование схемы лобового забоя экскаватором с прямой лопатой
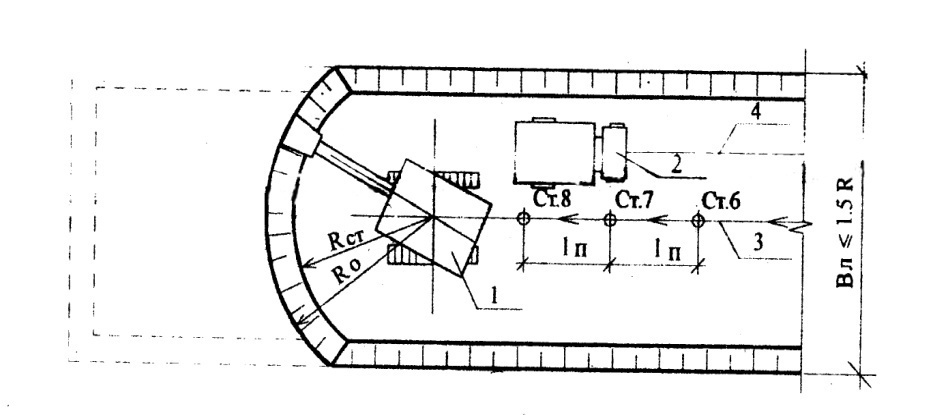
Ширина лобового забоя поверху при движении экскаватора по прямой определяется по формуле:
где R0 - оптимальный радиус копания; R0=0,8 R= 0,8*8,9 = 7,12 м, (13) ln - длина рабочей передвижки экскаватора ln=R – rст = 8,9 – 5,0 = 3,9 м, (14) где R = 8,9 м – максимальный радиус резания грунта на уровне стоянки; rст = 5,0 м – минимальный радиус резания грунта на уровне стоянки. Определение количества проходок: где ав – размер котлована поверху (м), Впр – расчетная ширина забоя (м) Фактическая ширина забоя
1 - экскаватор; 2 - автосамосвал; 3 - ось движения экскаватора; 4 - ось движения автосамосвала Рисунок 6 - Лобовой забой экскаватора прямая лопата При ширине разрабатываемого котлована более 2R, но менее 3,5R следует применять уширенный лобовой забой, схема движения экскаватора по зигзагу
Определение количества проходок: Фактическая ширина забоя:
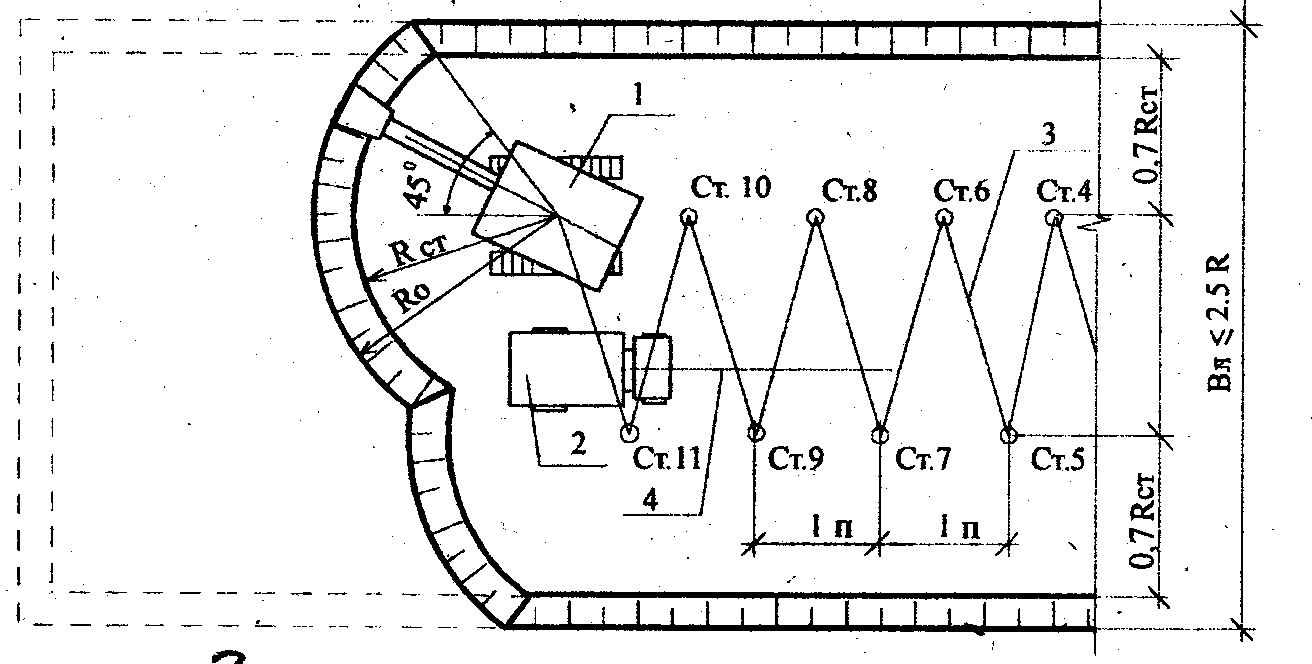
1- экскаватор; 2- автосамосвал; 3- ось движения экскаватора по зигзагу; 4- ось движения автосамосвала Рисунок 7 - Уширенный лобовой забой экскаватора прямая лопата
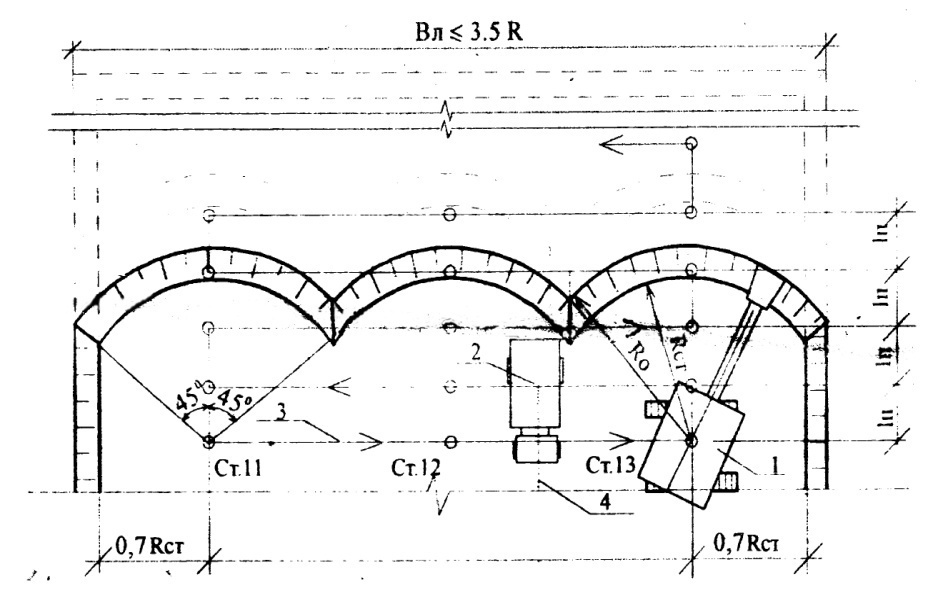
При ширине разрабатываемого котлована до 3,5R следует применять уширенный лобовой забой с поперечно-челночной схемой движения экскаватора. Общая ширина забоя при трех поперечных стоянках будет определяться
Определение количества проходок: Фактическая ширина забоя:
Рисунок 8 - Уширенный лобовой забой экскаватора прямая лопата
|
 м, (12)
м, (12) , (15)
, (15)
 (16)
(16)
 (17)
(17)

 (18)
(18)