Проектирование схемы бокового забоя экскаватором с прямой лопатой
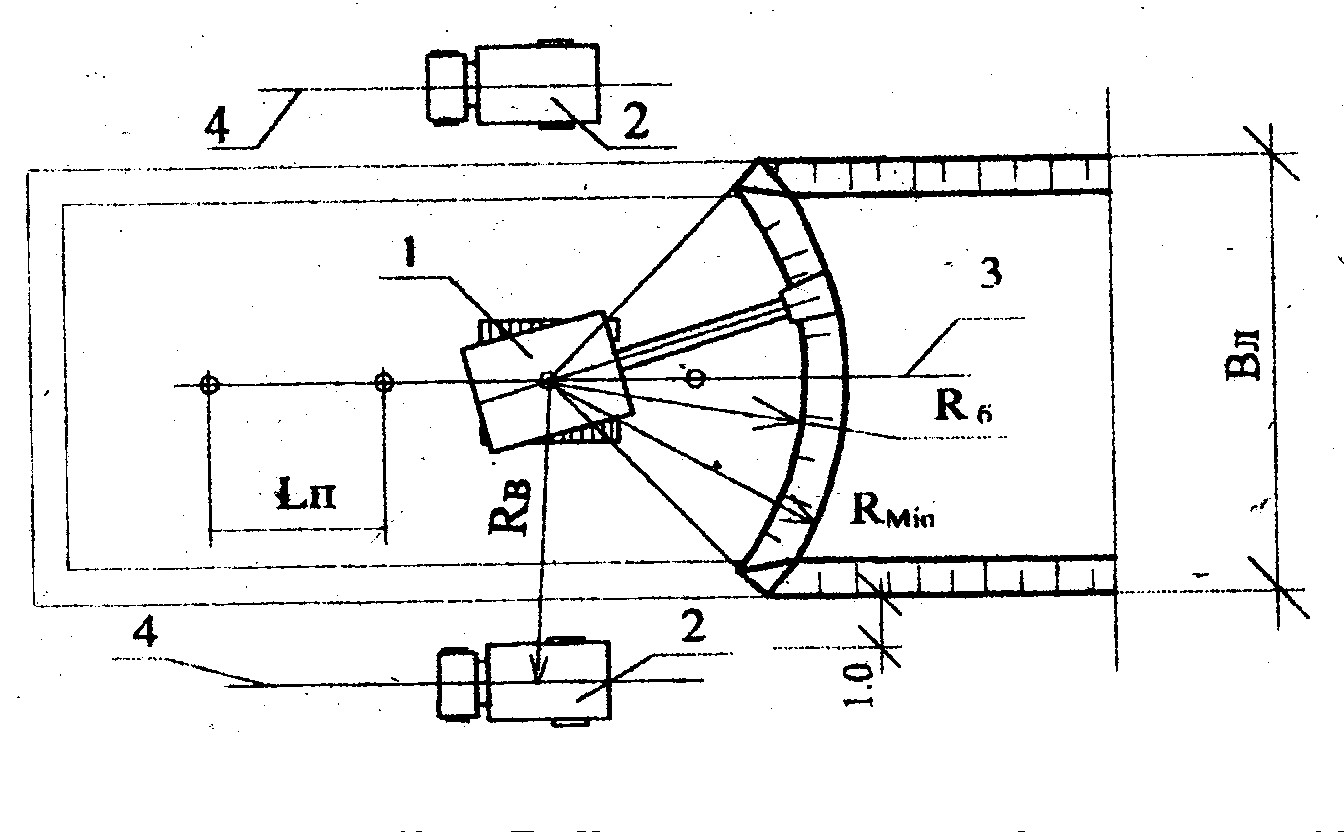
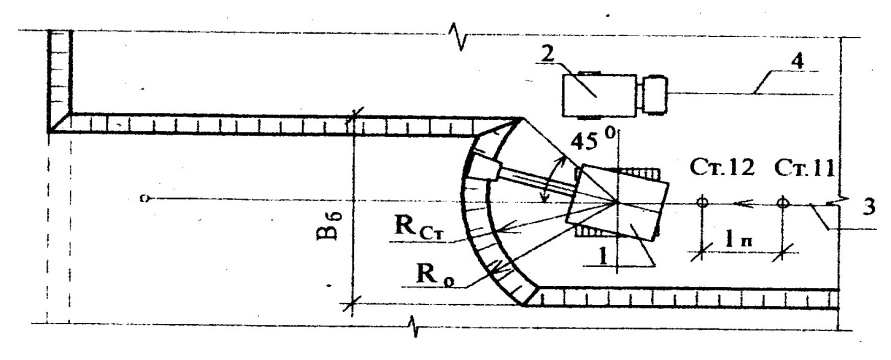
При ширине выемки более 3R первая проходка экскаватора принимается лобовым забоем, все последующие – боковые. При боковом забое (рисунок 9) ось движения экскаватора смещается к ранее выработанному забою так, чтобы угол α был не более 45°. Ширина бокового забоя равна
Определение количества проходок: 
Фактическая ширина забоя:
1 - экскаватор; 2 - автосамосвал; 3 - ось движения экскаватора по челночной схеме; 4 - ось движения автосамосвала Рисунок 9 - Боковой забой экскаватора прямая лопата
Следовательно котлован рациональней разрабатывать с меньшим числом проходок, а это значит уширенным лобовым забоем с поперечно-челночной схемой движения экскаватора
1.3.2 Разработка котлована экскаватором, оборудованного обратной лопатой
При погрузке грунта в автосамосвалы, расположенные по обе стороны от оси движения экскаватора (рисунок 1.7), ширину торцевой (лобовой) проходки по верху ВТ, м, определяют по выражению
где lрук= 2 м [1,стр. 70,таб.4] - длина рукояти экскаватора обратная лопата, м; R=9,7 – максимальный радиус резания грунта на уровне стоянки, м; Определение количества проходок: Фактическая ширина забоя:
1 - экскаватор; 2 - автосамосвал; 3 - ось движения экскаватора; 4 - ось движения автосамосвала Рисунок 10 - Торцевой забой экскаваторов обратная лопата и драглайн
|
 м, (19)
м, (19)
 , (20)
, (20) , (21)
, (21)