ЛЕКЦИЯ 8. 1 Технические средства систем управления
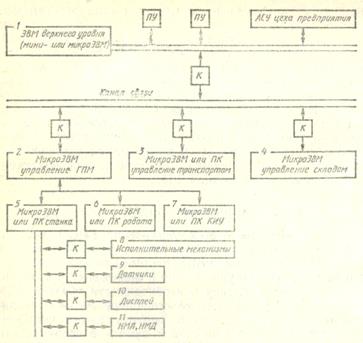
1 Технические средства систем управления Иерархия систем управления ГПС и различный тип задач, решаемых на разных уровнях, высокие требования к надежности АСУ, территориальная рассредоточенность объектов управления и некоторые другие причины приводят к выводу о необходимости иметь в АСУ ГПС сеть ЭВМ различного класса. Современные вычислительные машины с развитыми периферийными устройствами типа дисплеев и дисковой памяти в совокупности с линиями связи между ЭВМ составляют основу технических средств АСУ ГПС. Применение ЭВМ в АСУ ГПС. На рисунок 1 показана структурная схема взаимодействия различных вычислительных средств в АСУ ГПС. Верхние уровни управления ГПС типа участка обычно оснащают мини-ЭВМ, которая по линиям связи соединена с микроЭВМ или программируемыми контроллерами (ПК) (специализированные управляющие микро ЭВМ). Возможен вариант схемы с тремя уровнями управления. Например, от мини-ЭВМ управляющие команды передаются на микро ЭВМ 2, которая управляет гибким производственным модулем ГПМ. Тогда на нижнем уровне будут функционировать вычислительные средства 5, 6, 7 для станка с ЧПУ, промышленного робота, контрольно-измерительного устройства КИУ. Для канала (шины) связи 5 станка показаны устройства, воспринимающие и отрабатывающие управляющие команды. Через контроллер К т. е. устройство согласования и связи, подключены исполнительные механизмы (приводы), релейные схемы, датчики, накопители на магнитной лейте НМЛ или магнитных дисках НМД, индикаторы, дисплей (устройство связи с оператором).
Рисунок 1 - Состав технических средств АСУ ГПС Степень совершенства АСУ ГПС и возможность дальнейшего развития системы зависят как от характеристик вычислительной техники, линий связи и средств сопряжения (аппаратная часть), так и от применяемого программно-математического обеспечения. В настоящее время вычислительные средства для ГПС, начиная от контроллеров и систем управления станками с ЧПУ и кончая ЭВМ верхнего уровня, строят на интегральных микросхемах (ИС). Интегральная микросхема — это конструктивно законченное устройство, выполняющее определенную функцию преобразования сигнала и имеющее высокую плотность упаковки электрически соединенных элементов. Интегральные схемы имеют огромные преимущества по сравнению с ранее применяемыми дискретными элементами. Их возможности увеличиваются при переходе от ИС малой степени интеграции к большим интегральным схемам (БИС) и сверхбольшим интегральным схемам (СБИС). Они весьма компактны, для питания требуется незначительная мощность источников, при выпуске ИС большими сериями процесс их изготовления автоматизируется, что приводит к значительному снижению стоимости и увеличению надежности. Повышенная надежность ИС определяется также небольшим количеством контактов и паек. Микропроцессор — это программно управляемое устройство, осуществляющее прием, обработку и выдачу цифровой информации и построенное на одной или нескольких ИС. Дальнейшее развитие технологии изготовления БИС и СБИС, новые разработки микропроцессоров и других ИС позволили перейти к выпуску однокристальных микро-ЭВМ. В этих ЭВМ помимо микропроцессора имеется небольшое оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ) микропрограмм, устройства ввода-вывода, таймер (счетчик времени) и генератор тактовых импульсов, которые используют для управления работой блоков микро ЭВМ. Широкое применение в АСУ ГПС, особенно на средних и нижних уровнях управления, получили микро-ЭВМ и программируемые контроллеры. Микро ЭВМ—это устройство, состоящее из микропроцессора, запоминающего устройства, интерфейса ввода-вывода и пульта управления, объединенных в одной несущей конструкции. Интерфейс определяет правила и конструктивные решения для связи объектов с ЭВМ. Интерфейсы реализуются программным способом и аппаратными средствами. Они могут обеспечивать взаимодействие нескольких ЭВМ и стандартного периферийного оборудования типа печатающих устройств, перфоленточных фотовводов, дисплеев. Наибольшую сложность представляют интерфейсы для связи ЭВМ и технологического оборудования, которые могут значительно отличаться друг от друга по исполнительным механизмам, устройствам отображения информации, диагностики, средствам связи с оператором. Унификация устройств управления технологическим оборудованием ведет к применению стандартных интерфейсов, что значительно снижает сложность программного управления и АСУ ГПС.
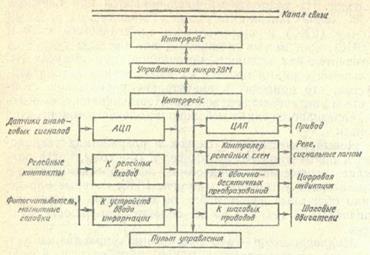
Рисунок 2 - Периферийные устройства управляющей микро ЭВМ Структурная схема взаимодействия управляющей микро ЭВМ с периферийными устройствами (рисунок 2) отражает не только способы передачи и преобразования информации, но и иллюстрирует возможности микроЭВМ при использовании ее в АСУ ГПС. Каналы связи на схеме разделены на приемные и передающие, что часто используется при реализации связей с периферийными устройствами (ПУ). Использование в технологическом оборудовании аналоговых сигналов для управления или контроля требует присутствия аналого-цифровых (АЦП) и цифроаналоговых (ЦАП) преобразователей. Например, индуктивные датчики измерительных устройств на выходе имеют плавно изменяющиеся напряжения, величина которых зависит от измеряемого размера. В этом случае необходимо в схеме взаимодействия предусматривать АЦП. Примером использования ЦАП является управление приводами постоянного тока станка или робота, где обычно требуется аналоговый управляющий сигнал для задания напряжения тиристорного преобразователя. Контроллеры могут размещаться отдельно от ЭВМ и ПУ, но возможно их выполнение совместно с микро ЭВМ или СУ периферийными устройствами. Для стандартных ПУ типа дисплея или внешнего запоминающего устройства контроллеры разрабатывают производители аппаратуры; контроллеры располагают на одной из плат микро ЭВМ. В системах управления объектами ГПС очень часто используют релейные схемы. Сигналы типа «включить— выключить» необходимы для управления электроавтоматикой оборудования, для отработки перемещений, подачи напряжения на сигнальные лампочки, управления двигателями подачи смазывающе-охлаждающих средств, для получения информации от различных кнопок, ключей, путевых выключателей, средств защиты и т. п. Релейные схемы очень широко используют при программном управлении автоматическими переналаживаемыми линиями, где поток информационных и управляющих сигналов связан с десятками и сотнями мест (точек) линии. Для контроля за работой технологического оборудования, особенно в режиме наладки или ремонта, важно иметь цифровую информацию о перемещениях рабочих органов, номерах кадров управляющей программы. Функции преобразования двоичных чисел в десятичные выполняет контроллер двоично-десятичных преобразований. Выпускаемые промышленностью микро ЭВМ типа «Электроника-60», «Электроника-80» имеют архитектуру и систему команд мини-ЭВМ СМЗ, СМ4, СМ1420, «Электро-ника-79», PDP-11 фирмы DEC, которые широко применяют в системах управления производственными процессами. Для указанных ЭВМ характерны удобная для использования в управлении система команд, рациональный интерфейс, широкий набор периферийного оборудования и программного обеспечения. Семейство этих машин реализовано как ряд совместимых снизу вверх процессоров, ориентированных на использование в системах управления. Совместимость снизу вверх означает, что программное обеспечение с микро-ЭВМ может быть перенесено без изменений на мини-ЭВМ этого семейства. Программная совместимость указанных ЭВМ различного класса и широкий набор системных и прикладных программ, а также перечисленные выше достоинства объясняют тот факт, что большая часть систем управления ГПС основана на использовании ЭВМ семейства СМ4, PDP-11. Микро ЭВМ настольного типа, имеющие минимальный набор периферийных устройств в виде дисплея, накопителя на гибких магнитных дисках или кассетах с магнитной лентой, устройства печати, получили название персональных (личных) компьютеров. По области применения персональные компьютеры делят на бытовые, обучающие и профессиональные. Последние отличаются расширенным комплектом периферийных устройств для ввода-вывода информации и высокой производительностью. Эти компьютеры рекомендуют применять в АСУ ГПС. В устройствах управления ГПС используют микро-ЭВМ мод. «Электроника-60», комплексы «Электроника-60/25», СМ 1300, ДВК. Наряду с разработкой персональных ЭВМ отмечается и другое направление в развитии микропроцессорной техники. Для устройств с жесткими (постоянными) алгоритмами управления выпускают большое количество специализированных заказных микропроцессоров и больших интегральных схем (БИС). Заказные микропроцессорные схемы обычно применяют в тех случаях, когда известно, что за время жизненного цикла изделия не должна меняться программа управления устройства, построенного на заказных БИС. Кроме этого, аппаратная реализация алгоритмов управления значительно повышает производительность систем, сокращает время реакции на запрос и улучшает защиту данных. Программируемые контроллеры (ПК), так же как и заказные БИС, относят к специализированным средствам. ПК представляет собой специализированную управляющую микро ЭВМ, работающую в режиме реального времени по фиксированным рабочим программам, размещенным в постоянном запоминающем устройстве. Различают три типа ПК: для замены релейных схем автоматики; для регулирования аналоговых величин технологических процессов и используется для замены регуляторов температуры, давления расхода; для реализации сложных алгоритмов управления станками, роботами, транспортом. Задачи верхних уровней системы управления ГПС отличаются большей сложностью и разнообразием по сравнению с задачами нижнего уровня АСУ ГПС. Поэтому повышаются требования к характеристикам ЭВМ верхнего уровня по быстродействию, вместимости оперативной и внешней памяти, оснащенности периферийными устройствами. Для АСУ ГПС верхнего уровня наиболее часто применяют мини-ЭВМ, которые по своим характеристикам занимают промежуточное положение между универсальными ЭВМ общего назначения и микроЭВМ. Следует отметить, что в настоящее время наблюдается процесс сближения характеристик микро- и мини-ЭВМ вследствие интенсивных разработок и успехов в технологии изготовления микроЭВМ. В ряде случаев только по комплекту периферийного оборудования ЭВМ можно отнести к тому или иному классу. Мини-ЭВМ, применяемые в АСУ ГПС, ориентированы на управление системы с большим числом источников и приемников данных, имеют объем оперативной памяти до 1 Мбайта, быстродействие на уровне 200—500 тыс. операций/с, внешнюю дисковую память вместимостью в десятки мегабайт. Мини-ЭВМ в составе АСУ ГПС дополнительно оснащается алфавитно-цифровыми печатающими устройствами, дисплеем с клавиатурой для взаимодействия оператора с ЭВМ, перфоленточным вводом-выводом. В составе внешних запоминающих устройств кроме магнитных дисков обычно имеется накопитель на магнитной ленте. Накопители на твердых магнитных дисках являются основным местом хранения рабочих программ АСУ ГПС, справочных данных, числового материала задач большой размерности. На дисках хранятся управляющие программы для станков с ЧПУ. Объем памяти для дисков и их наборов составляет десятки и сотни мегабайт. Комплектация мини-ЭВМ зависит от набора задач, решаемых в АСУ ГПС. Так как для большинства ГПС механической обработки резанием на верхнем уровне в подсистеме ТПП разрабатываются управляющие программы для станков с ЧПУ, то комплект периферийных устройств ЭВМ необходимо дополнить графопостроителем для проверки программ и исключения грубых ошибок. Эффективным средством для решения ряда задач проектирования технологических процессов и управляющих программ является графический дисплей. Графический дисплей, оснащенный световым пером для управления элементами изображения и устройством для кодирования графической информации, в совокупности с программным обеспечением диалогового режима позволяет значительно повысить производительность технолога-программиста. Задачи АСУ ГПС, решаемые при технологической и организационной подготовке производства, отличаются значительным объемом вычислений, используют большое количество справочной и текущей информации, требуют аппаратных и программных средств для организации диалогового режима работы с пользователем. Для задач оперативного управления и регулирования (средний уровень) главным является высокая надежность и быстродействие их выполнения. Различные требования к функциям АСУ ГПС приводят к тому, что на верхних уровнях управления нередко используют более чем одну ЭВМ. При создании ГПС применяют вариант с использованием отдельной ЭВМ для технологической и организационной подготовки производства. В другом варианте на одной из ЭВМ решают задачи технологической подготовки производства, на другой рассчитывают календарные планы и необходимые организационно-экономические данные (размеры партий деталей, заделы и пр.). При этом вычислительные ресурсы используемых ЭВМ позволяют выполнить указанные функции не только для конкретной ГПС, но и для нескольких ГПС или цеха. Такой подход объясняется снижением стоимости вычислительной части ЭВМ и стремлением расширить фронт автоматизации на уровне цеха для дальнейшего объединения с АСУ предприятием. Реализация этих направлений в значительной степени зависит от создания эффективной системы связи между ЭВМ. Локальные сети связи. Одним из компонентов технических средств АСУ ГПС являются устройства связи отдельных ЭВМ в ГПС. Для связи средств вычислительной техники известны два основных метода — глобальные и локальные сети. Узлами (абонентами) сети являются ЭВМ или терминалы. Терминал — это устройство типа дисплея с пультом управления для связи диспетчера и оператора ГПС с управляющими ЭВМ и доступа к вычислительным и информационным ресурсам сети. В глобальных сетях расстояние между удаленными узлами достигает сотен и тысяч километров. Локальная сеть предназначена для обслуживания небольшой территории (участка, цеха, завода) с расстоянием между абонентами не более чем несколько километров. В них для передачи данных используют общий канал (моноканал), реализованный парой скрученных проводов или более дорогим, надежным и быстродействующим коаксиальным кабелем. Лучшие характеристики по скорости передачи и надежности имеют волоконно-оптические линии — световоды, но их применение пока ограничивает высокая стоимость. В настоящее время для ЛС более предпочтительны коаксиальные кабели. Скорость передачи данных в зависимости от длины и типа кабеля составляет от 0,6 до 10 Мбит/с. Без восстановления сигнала длина кабеля может достигать 0,6—1,2 км. Такие характеристики перекрывают требования задач по обмену информацией в АСУ ГПС. Объем передаваемой информации в ЛС зависит не только № возможной скорости и, следовательно, физических характеристик канала связи, но и от структуры ЛС и способа передачи данных. Для ЛС в основном используют две схемы построения сети — магистраль (шина) и кольцевой моноканал. По магистральной схеме все абоненты подключаются параллельно к каналу связи, и тогда сигналы, передаваемые в одном из узлов ЛС, достигают всех абонентов. В кольцевых ЛС передаваемые данные обычно поступают в соседний узел, где производится ретрансляция полученных сигналов к следующей станции. Имеются разработки кольцевых ЛС с резервированием дополнительной линии связи. Данный вариант построения ЛС усложняет аппаратуру и программное обеспечение сети, но увеличивает надежность и позволяет производить подключение новых абонентов или ремонт без выключения всей ЛС. Методы доступа к ЛС с распределенным управлением весьма разнообразны и постоянно совершенствуются. Можно выделить три основных способа для доступа абонентов к каналу связи. В ЛС со случайным доступом все подключаемые средства равнозначны и поэтому могут передавать сообщения в любой момент времени. Однако это приводит к частому столкновению сообщений в канале, так как два и более узлов сети могут одновременно осуществлять передачу данных. Эти столкновения приводят к искажению информации, поэтому сообщения должны передаваться повторно, и опять может возникнуть подобный конфликт. Детерминированные способы доступа к каналу связи основаны на определенном порядке в подключении абонентов для передачи сообщений. Случайные и детерминированные способы доступа не позволяют получить коэффициент использования канала ЛС более 10—20%. Коэффициент использования определяется как отношение достигнутой скорости передачи данных к пропускной способности ЛС. Наиболее перспективные способы доступа в ЛС основаны на прослушивании канала связи всеми абонентами. При этом подключаться к каналу можно только при отсутствии сигналов в нем Данный способ позволяет использовать пропускную способность канала связи на 80—98 %. Столкновения сообщений возможны и в этом случае; поэтому в ЛС контролируется переданное сообщение. Для подключения абонентов к каналу связи используют аппаратные и программные средства. Устройство, управляющее доступом к сети и обменом информацией, по сложности соответствует одноплатной микро ЭВМ. Подключаемая ЭВМ имеет программное обеспечение сети, которое включает программное управление передачей и информационным каналом. Информационный кадр для канала связи имеет следующую структуру: вначале следует заголовок кадра, где указываются адреса отправителя и получателя; далее идет главная информационная часть кадра размером от 128 до 1024 байтов в зависимости от типа сети; кадр заканчивается кодовой комбинацией для проверки правильности принятия информации. Таким образом, кадр напоминает почтовый конверт с адресами получателя и отправителя, а основу составляет содержимое конверта. Функции ЛС для ГПС должна обеспечивать связь между программами в удаленных ЭВМ, организовать доступ к данным независимо от места их физического хранения, реализовать связь между персоналом ГПС, выполнять загрузку задач, организовать управление ЛС. В настоящее время разработаны различные варианты ЛС, в том числе и для АСУ ГПС. Из получивших распространение необходимо отметить пакет программ для сетевой телеобработки (ПП СТО), который можно использовать для организации сети из микро- и мини-ЭВМ семейства «Электроника-60», СМ4. Список используемой литературы: 1 Капустин Н.М., Дьяконова Н.П., Кузнецов П.М. Автоматизация машиностроения. -М.: Высшая школа. 2003 -223с. 2 Терган В.С, Андреев И.Б., Либерман Б.С. Основы автоматизации производства. –М.: Машиностроение. 1982 -272с. 3 Шишмарев В.Ю. Автоматизация технологических процессов. –М.: Академия, 2007. -352с.
|