Структурные схемы управления РЭГ - приводами.
Изменение направления подачи масла от насоса на рулевую машину, необходимое для перекладки руля, производится специальным управляющим устройством - сервомеханизмом. В РЭГ- приводах с насосами постоянной подачи оконечный каскад сервомеханизма представляет собой дросселирующий золотник, посредством которого насос связывается с рулевой машиной. Управление золотником осуществляется магнитным (соленоид) или машинным серводвигателем, который воздействует на золотник непосредственно или через промежуточный гидроусилитель. В приводах с насосами переменной подачи сервомеханизм включает в себя электрический двигатель, связанный через кинематическую передачу с манипулятором насоса. Часто в состав управляющей кинематики включают гидроусилитель, что существенно снижает мощность электрического серводвигателя. Рассмотрим обобщённую разомкнутую схему ручного управления рулём по времени.
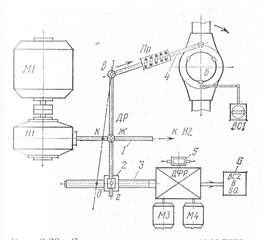
Где: Y- электрический усилитель; СР - серводвигатель; ГУ - гидроусилитель Н - насос переменной подачи (ГЗ - гидрозолотник в системе управления с насосом нерегулируемой подачи); РМ - рулевая машина;
Простое управление рулём. (контур регулирования разомкнут.) При подаче напряжения Uвх последовательно отрабатывают все звенья и начинается перекладка руля. Шток поршня гидроусилителя жёстко связан с манипулятором насоса Н. Перемещение манипулятора ограничено, поэтому пропорциональность между движением золотника гидроусилителя и ходом его поршня характерна только при сравнительно малых перемещениях. При снятии управляющего напряжения Uвх серводвигатель останавливается, но подача насоса не прекращается. Для остановки руля необходимо, чтобы серводвигатель включением в обратную сторону сместил манипулятор насоса в исходное положение. Таким образом разовая перекладка руля содержит четыре операции: включение серводвигателя, остановку, включение в обратном направлении, остановку. Это трудно. Для нормальной работы требуется, чтобы при снятии входного управляющего сигнала Uвх = 0 серводвигатель занимал исходное положение, что соответствует прекращению подачи масла на рулевую машину. В некоторых современных отечественных схемах управления (АТР, АИСТ) это делается специальным пружинным нуль - установителем, задача которого вернуть серводвигатель или точнее золотник гидроусилителя в нулевое положение после отключения. Иностранные фирмы часто используют сервопривод с электромагнитным управлением. Золотник такого привода всегда имеет пружинный самовозврат. Таким образом, простое управление рулём по данной структурной схеме возможно при автоматическом возвращении элементов в исходное положение после снятия сигнала управления. Следящее управление. Система следящего управления может быть создана путём замыкания входа и выхода рассмотренной схемы через соответствующие преобразующие устройства. Внутри следящего контура оказываются последовательно включёнными два интегрирующих звена - СР и РМ. Такие системы являются структурно неустойчивыми. Для придания устойчивости одно из интегрирующих звеньев должно быть охвачено жесткой обратной связью. Широко распространены схемы, где обратной связью охвачены два звена: рулевая машина РМ и насос регулируемой подачи.
Где К6- коэффициент усиления обратной связи, масштабно увязывающий воздействие на подачу насоса со стороны руля и со стороны усилителя. К7, К8- преобразователи угла поворота в эквивалентные электрические сигналы. А- суммирующее устройство. Общая схема следящего управления распадается на 2 независимых контура I и II. Поворот поста управления ПУ на некоторый угол вызывает перемещение выхода сервомеханизма на тот же угол, что в свою очередь определит угол перекладки руля. При больших углах перекладки, когда разность (α з – α 0)>5 Возможны и другие структурные схемы, но каждая из них требует определённый вид кинематики сервопривода. Рассматриваемая структурная схема предполагает использование управляющего механизма с рычажным дифференциалом. Рулевой привод имеет два насоса переменной подачи Н1 и Н2 (не показан), каждый из которых вращается своим исполнительным двигателем. Где 1- тяга обратной связи 2- дифференциальный рычаг 3- манипулятор насоса 4- каретка 5- винтовой шпиндель 6- штурвал местного управления 7- блок элементов обратной связи-В, путевые и конечные выключатели SQ. Тяга манипуляторов (3) является общей для обоих насосов, могут работать одновременно. Рассмотрим принцип действия. Перекладка руля дистанционно задаётся включением серводвигателя М3(М4). Через дифференциальный редуктор ДФР вращается винтовой шпиндель (5), который перемещает каретку (4). Пусть из точки г в точку д. Дифференциальный рычаг ДР, связанный с кареткой, поворачивается вокруг точки а, смещает тягу манипулятора (3) насосов. Начинается подача масла в гидроцилиндры рулевой машины, руль поворачивается по часовой стрелке. Тягой обратной связи (1) дифференциальный рычаг ДР, поворачиваясь вокруг точки g, смещает манипулятор в сторону нейтрального положения, достигнув которого в точке с, перекладка прекращается.
|

 - передаточные функции отдельных звеньев.
- передаточные функции отдельных звеньев.
 , поворот манипулятора насоса ограничивается (создан ε
, поворот манипулятора насоса ограничивается (создан ε  ). Движение же задающего органа αз может продолжаться из-за наличия специальной аккумулирующей пружины. Следовательно, при больших углах перекладки насос работает с максимальной подачей и начинает снижать её за 5
). Движение же задающего органа αз может продолжаться из-за наличия специальной аккумулирующей пружины. Следовательно, при больших углах перекладки насос работает с максимальной подачей и начинает снижать её за 5