
Проектирование плунжерных РЭГ – приводов.
В задании на проектирование должны быть указаны главные размерения судна, источники электроэнергии, род тока и напряжения, нагрузочная характеристика рулевой машины - Проектирование производится в следующей последовательности: - определяются размерения гидропресса, рассчитывается и строится зависимость давления в цилиндрах (цилиндре) от хода поршня p = f(H) или от угла перекладки руля; - рассчитывается необходимая подача гидронасоса, его параметры; - рассчитывается и строится нагрузочная диаграмма РЭГ - привода; -производится предварительный расчет мощности и выбор исполнительного электродвигателя; - проверка выбранного двигателя: а) по перегрузочной способности; б) на нагрев; в) на выполнение требований Регистра. - проектируется схема управления, защиты и сигнализации исполнительного двигателя; - проектируется схема управления сервопривода насоса переменной (постоянной) подачи; - производится выбор аппаратов и элементов управления, защиты и сигнализации; - составляется спецификация.
5.1. Расчет мощности, выбор и проверка исполнительного двигателя плунжерного привода.
1.) Определение диаметра и хода плунжера гидропресса. Упрощение схема будет иметь вид:
где: 1- цилиндр; 2- плунжер; 3 – направляющая; 4 – ползун; 5 – поворотная муфта с цапфами; 6 – румпель; 7 – баллер. Введем обозначения: Д- диаметр цилиндра, м; l 0- расстояние от оси цилиндров до оси баллера, м; l- переменная длина румпеля, м; Н = l0 tgα- ход плунжера, м; i - число пар цилиндров;
Рассмотрим усилия, действующие в гидроприводе. При ходе плунжеров вправо момент на баллере будет создавать силу сопротивления
Силу Р разложим на составляющие:
По формуле приведения Перекладка руля осуществляется под действием силы давления
р=6,10 р с = 6·105 ÷9·105 – условное противодавление, учитывающее гидравлические потери в трубопроводах. По третьему закону Ньютона сила действия равна силе противодействия при равномерном движении, т.е. Р0 = F0.
В практике проектирования отношение Решая уравнение относительно диаметра плунжера при максимальном угле перекладки руля, получим уравнение
Рассчитав диаметр цилиндра, рассчитывают расстояние между осями цилиндров и баллера 2.) Расчет и построение зависимости р = f(H) Для расчета мощности исполнительного электродвигателя насоса необходимо знать давление в цилиндрах, которое зависит от момента на баллере руля и от угла перекладки руля
(при Задаваясь значениями угла перекладки руля через каждые 5 Примерные значения КПД плунжерного рулевого привода даны в методичке и л. [ 1 ], стр.290. Полученные диаграммы упрощают методом кусочно-линейной аппроксимации, при этом отрицательными давлениями пренебрегают, так как при них насос не выполняет практически никакой работы. При линеаризации необходимо сохранить величины максимальных давлений и площади диаграмм, определить граничные значения углов перекладки руля и рассчитать для них значение хода поршня.
Зависимость р = f(
|
 , тип гидропресса и гидронасоса.
, тип гидропресса и гидронасоса.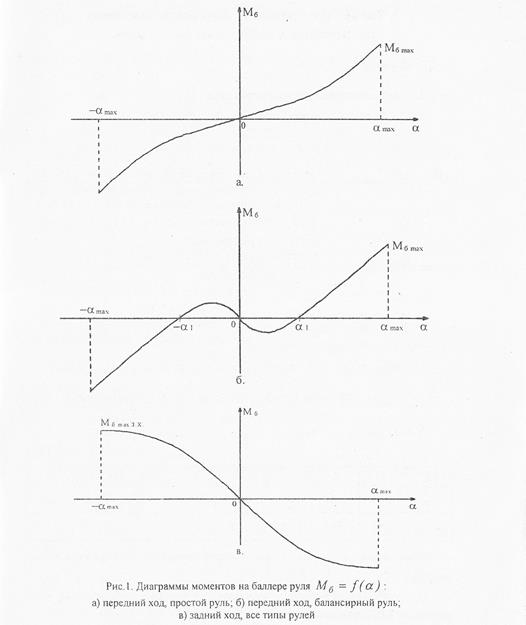
 - КПД гидропривода: является функцией угла перекладки руля -
- КПД гидропривода: является функцией угла перекладки руля -  , имеет значения в пределах
, имеет значения в пределах  0,84-0,71;
0,84-0,71; - максимальный ход плунжера, м;
- максимальный ход плунжера, м; - полный ход плунжера.
- полный ход плунжера. , где
, где  - переменное плечо силы, следовательно
- переменное плечо силы, следовательно , где
, где 
 - поперечная составляющая; воспринимается направляющей через ползуны.
- поперечная составляющая; воспринимается направляющей через ползуны. - продольная составляющая -
- продольная составляющая - 
 , тогда
, тогда 
 , которая может быть определена уравнением
, которая может быть определена уравнением , где Д – диаметр цилиндра, м;
, где Д – диаметр цилиндра, м; - индикаторное давление, Па;
- индикаторное давление, Па; Па – расчетное номинальное давление в цилиндре,
Па – расчетное номинальное давление в цилиндре,
 .
.
 . Из технологических соображений уточнют значения Д и
. Из технологических соображений уточнют значения Д и  .
. ;
; 
 >0) (при
>0) (при  от - 35
от - 35  )для переднего и заднего хода.
)для переднего и заднего хода.





