Общие сведения. Индуктивные датчики относятся к группе параметрических датчиков, сопротивление которых имеет индуктивный характер
Индуктивные датчики относятся к группе параметрических датчиков, сопротивление которых имеет индуктивный характер. Конструктивно они представляют собой электромагнитный дроссель, индуктивность которого меняется в зависимости от перемещения одной из подвижных деталей дросселя (якоря). Индуктивность дросселя
где
L – индуктивность; W − число витков обмотки; l0, S0 − общая длина и площадь сечения воздушного зазора; l, S − длина средней силовой линии площадь сечения сердечника магнитопровода;
Рис. 1. Схема нереверсивного индуктивного датчика
Выходное напряжение индуктивного датчика (для случая активной нагрузки):
где Uвых − выходное напряжение индуктивного датчика; Iн − ток нагрузки; Rн − сопротивление нагрузки; R − активное сопротивление катушки индуктивности; Uп − питающее напряжение; ω; − частота питающего напряжения; L − индуктивность катушки с сердечником.
Пренебрегая активным сопротивлением и магнитным сопротивлением железа и считая S = S0, получим: где
Рис. 2 Статическая характеристика нереверсивного индуктивного датчика
Расхождение реальной и расчётной характеристик на начальном участке объясняется пренебрежением магнитным сопротивлением магнитопровода, а на конечном участке характеристики − активным сопротивлением катушки и сопротивлением нагрузки. Достоинства: высокая чувствительность, надёжность, мощный выходной сигнал. Недостатки: нелинейность статической характеристики, большие электромагнитные усилия на якоре, наличие нулевого выходного сигнала, зависимость крутизны статической характеристики от частоты и напряжения питания.
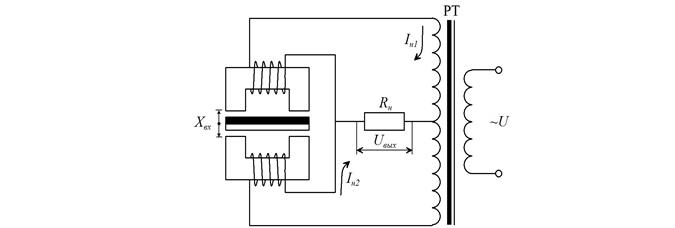
Рис. 3 Дифференциальная схема включения индуктивного датчика
Недостатком дифференциального датчика является необходимость наличия двух источников питания, что обеспечивается разделительным трансформатором.
Рис. 4 Мостовая схема включения индуктивного датчика
Мостовые схемы менее экономичны из-за потерь в балластных сопротивлениях и поэтому применяются для маломощных датчиков. Фаза Uвых меняется в функции от направления перемещения, крутизна статической характеристики в 2 раза выше. Преимущества реверсивных датчиков: большая чувствительность, усилия на якорь частично компенсируются, большая линейность статической характеристики, меньшая зависимость от температуры и изменения питания, меньшая величина Uп, меньшая зависимость от частоты питания.
где Uвыхх − напряжение холостого хода; Zвых − сопротивление схемы со стороны выхода (выходное сопротивление); Zн − сопротивление нагрузки. Максимум активной мощности в нагрузке Zн будет при Rн = Rвых, Xн = Xвых Достоинства индуктивных датчиков: бесконтактность, надёжность, высокая чувствительность, высокая разрешающая способность. Недостатки индуктивных датчиков: техническая сложность регулирования (балансировки) датчика, наличие напряжения небаланса, при Xвх = 0 за счёт неполной симметрии схемы, резкое снижение чувствительности с увеличением Xвх, зависимость Uвых от частоты питания, работа лишь на переменном токе.
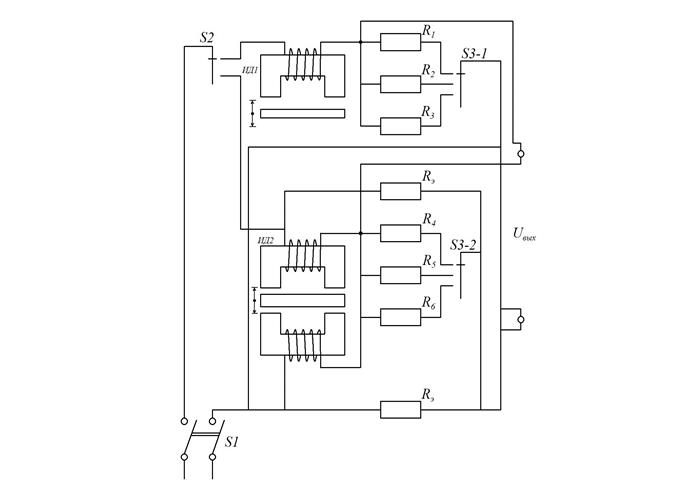
Рис. 5 Схема лабораторной установки
Результаты измерений на нереверсивном датчике. Таблица 1.
Рис. 6 Статическая характеристика нереверсивного датчика
Вывод: В данной работе был изучен принцип действия индуктивных датчиков, построены статические характеристики и определены коэффициенты чувствительности реверсивных и нереверсивных датчиков.
Используемая литература:
1. Глухов В.В.. Пособие по выполнению лаб. работы № 2 «Исследование индуктивных датчиков» РИО МГТУ ГА, М., 2007. 2. Солодовников В.В., Плотников В.Н., Яковлев А.В. Основы теории и элементы систем автоматического регулирования. М. Машиностроение, 1985 г.
|
 ,
, − магнитное сопротивление воздушного зазора;
− магнитное сопротивление воздушного зазора; − магнитное сопротивление материала сердечника и якоря;
− магнитное сопротивление материала сердечника и якоря; ,
,  − магнитная проницаемость воздуха и материала сердечника.
− магнитная проницаемость воздуха и материала сердечника.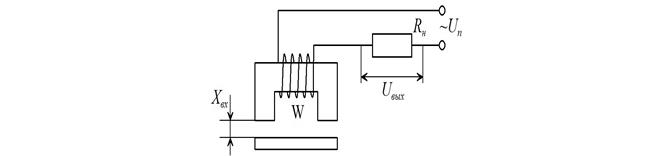
 ,
, и
и  или
или  ,
, − входная величина (2
− входная величина (2  − крутизна статической характеристики датчика.
− крутизна статической характеристики датчика.

 ,
,