
Схемы с несимметричным включением реактивных сопротивлений в цепь статора асинхронного электродвигателя
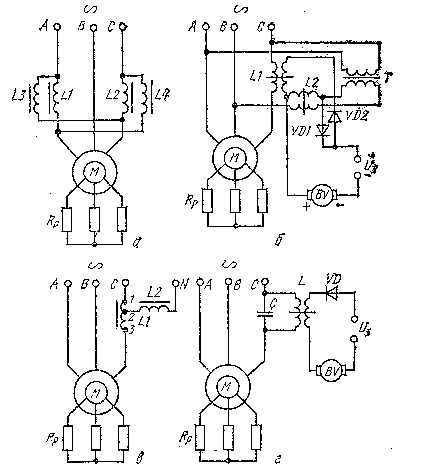
Для подъемно-транспортных устройств эффективно применение различных схем, обеспечивающих получение пониженных скоростей путем включения в цепь статора реактивных сопротивлений (рис. 1). В качестве этих сопротивлений часто используют дроссели насыщения с подмагничиванием. Последовательное включение их в одну или две фазы статора электродвигателя позволяет осуществлять реверс (подъем, спуск) и получать пониженные скорости из-за различной степени асимметрии напряжений.
Рис. 1. Схемы с нессиметричным включением реактивных сопротивлений в цепь статора асинхронного электродвигателя.
За счет системы дроссельного управления осуществляется непрерывное регулирование напряжения, подаваемого на обмотки статора асинхронного электродвигателя, в связи с изменением индуктивного сопротивления дросселей насыщения. В свою очередь изменение индуктивного сопротивления дросселей насыщения, рабочие обмотки которых включены последовательно статорным, производится изменением величины выпрямленного тока в обмотках управления дросселей насыщения. Из теории асинхронных машин известно, что при неизменном нагрузочном моменте скольжение электродвигателя обратно пропорционально напряжению, а при постоянном скольжении вращающий момент его прямо пропорционален квадрату напряжения, подводимого к обмотке статора. В связи с этим, применяя дроссели насыщения, можно регулировать либо скольжение, либо вращающий момент электродвигателя. Для обеспечения требуемой жесткости механических характеристик в схемах с дросселями насыщения обычно применяется обратная связь но скорости. Для регулирования скорости электродвигателя при движении в одном направлении (подъем груза, см, рис. 1, а ) создают различную степень подмагничивания дросселей насыщения L1 и L2, изменяя величину тока в их обмотках управления, не показанных на схеме (при полностью размагниченных дросселях насыщения L3 и L4 ). Для регулирования скорости электродвигателя при движении в обратном направлении (спуск груза) изменяют величину тока подмагничивания дросселей насыщения L3 и L4 (при полностью размагниченных дросселях насыщения L1 и L2). На рис. 1,б приведена, схема с фазовращающим трансформатором Т с коэффициентом трансформации равным единице. В этой схеме знак и величина момента электродвигателя зависят от знака и величины задающего напряжения U3 и э. д. с, EBV тахогенератора BV , что обусловливает различную степень подмагничивания дросселей насыщения L1 или L2. Если в режиме подъема нагрузка уменьшается, то за счет увеличения скорости возрастает На рис. 1,в приведена относительно простая схема с дроссель-трансформатором (разработана в МЭИ). В режиме подъема происходит подмагничивание дросселя насыщения L1. При подмагничивании дросселя насыщения L2 и размагничивании L1 последний находится в режиме автотрансформатора и к участку 1-2 его обмотки приложено фазное напряжение. При этом подбирается такое соотношение чисел витков участков дросселя 1-2 и 2 - З , чтобы па части обмотки индуктировалось напряжение, вдвое превышающее фазное. Схема, приведенная на рис. 1, г, применяется для управления электродвигателями механизма подъема крапов и послужила базой для разработкимагнитного контроллера ТСД-150 (завода «Динамо» им. С, М. Кирова). Преимуществами этой схемы сравнительно с другими схемами дроссельного управления являются: меньшее число дросселей и меньшая мощность их, экономия аппаратуры, меньшая электромагнитная постоянная обмотки управления и др.
Рис. 2. Схема магнитного контролера типа ТСД-150.
На рис. 2 приведена схема магнитного контроллера типа ТСД-150 для дроссельного управления электродвигателем подъема с применением фазоопрокидывающего конденсатора. Схема обеспечивает бесконтактный реверс путем изменения чередования фаз при соответствующем подмагничивании дросселя насыщения, шунтирующего конденсатор С. Наличие в схеме обратной связи по скорости (тахогенератор ВV ) позволяет стабилизировать скорость даже на неустойчивых участках характеристики. В первом положении подъема (рис. 3, характеристика In) на обмотку управления дросселя L подается напряжение Uy, являющееся разностью между напряжением на выходе полупроводникового выпрямителя
При неподвижном роторе электродвигателя в момент пуска Во втором и третьем положениях подъема (см. рис, 46 характеристики 2п и Зп) катушка контактора К7 обесточена и его контакты отключают от сети выпрямитель
Рис.3. Механические характеристики асинхронного электродвигателя при управлении магнитным контроллером типа ТСД-150
В первом положении спуска (см. рис. 3, характеристика 1с) в момент включения электродвигателя, когда его ротор еще неподвижен на обмотку управления дросселя подается минимальное напряжение Поэтому э. д. c. тахогенератора EBV складывается с напряжением
В связи с этим при разгоне электродвигателя уменьшается индуктивное сопротивление рабочей обмотки дросселя L и увеличивается вращающий момент электродвигателя. При таком процессе пуска обеспечивается минимальная скорость опускания груза при первом положении команде контроллера S. При втором положении спуска (см. рис. 3, характеристика 2с) контактор K7 отключает выпрямитель В третьем положении спуска (см. рис. 3, характеристика Зс) после срабатывания контактора К2 замыкается накоротко вход выпрямителя UZ2, питающего обмотку возбуждения ОВГ тахогенератора BV но цепи 1- Л11 -10 замыкающие контакты К2-Т1 - R1-2. В этом случае электродвигатель работает по обычной схеме. Достоинством дроссельного управления крановым электроприводом является глубокое и плавное регулирование скорости (диапазон регулирования 10: 14-15: 1). Масса, габаритные показатели и стоимость дроссельного электропривода крановых механизмов меньше, чем системы Г—Д: масса — в два раза, стоимость к габаритные показатели — в полтора раза. Поэтому дроссельные системы управления применяются для тех кранов, которые при длительных периодах работы со значительной установившейся скоростью требуют в то же время низких посадочных и остановочных скоростей (например, краны для раздевания слитков и др.).
|
 (полярность U3 и
(полярность U3 и  и ЕBV меняются на обратные. Фазосмещающий трансформатор Т служит для изменения порядка чередования фаз, т. е. для реверса электродвигателя.
и ЕBV меняются на обратные. Фазосмещающий трансформатор Т служит для изменения порядка чередования фаз, т. е. для реверса электродвигателя.
 и э, д. с, тахогенератора BV (на положениях подъема эти напряжения действуют встречно)
и э, д. с, тахогенератора BV (на положениях подъема эти напряжения действуют встречно)
 , а поэтому
, а поэтому  . В связи с этим ток подмагничивания имеет наибольшее значение, а индуктивное сопротивление рабочей обмотки дросселя — наименьшее. В процессе разгона электродвигателя нарастает э. д. с,
. В связи с этим ток подмагничивания имеет наибольшее значение, а индуктивное сопротивление рабочей обмотки дросселя — наименьшее. В процессе разгона электродвигателя нарастает э. д. с, 




