
Датчики физических величин. Структурная схема тензорезисторного датчика усилия.
ТД предназначены для измер-ий усилий, деформ-й, моментов. Представляя ТД в виде послед-ой цепи измер-х преобр-ей можно заметить, что некоторые из этих преобразователей яв-ся общими для всех датчиков. Каждый ТД включает в себя: тензорезистор и измерит-ю цепь независимо от того яв-ся ли он датчиком усилия или перемещения. Многие ТД включают в себя упругие элементы преобр-е усилия или давления в деформацию.
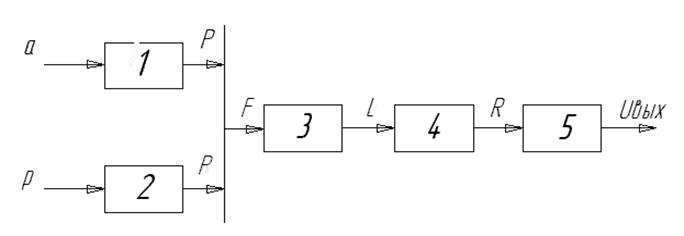
1-инерц груз 2-мембрана 3-упругий элемент 4-тензорезистор 5-измер-я цепь На рис. изображены струк-ая схема ТД усилия. Измеряемое усилие Р с помощью упругого элемента преобразуется в деформацию ∆ l, деформация измеряется в виде изменения сопротивления тензорезистора ∆R, которое в измер-й цепи
Датчик (Д) – часть измер-ой сис-мы, имеющую самостоятельное конструктивное оформление, но вместе с тем обеспечив-ую достижение полезного эф-та при наличии всех других средств, входящих в систему. Д осущ-ет преобразование вида энергии сигнала, идущего от объекта, в другой удобный для передачи инф-ии в пространстве и хранения в течении длительного времени. Индуктивный преобразователь
1-инерц. груз 2-мембрана 3-упругий элемент 4-индукционный преобр-ль 5-измерительная цепь
Входная величина стержневого упругого элемента:
|
 - сопротивление тензорезистора
- сопротивление тензорезистора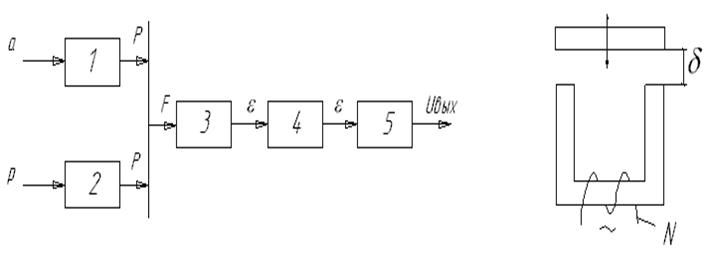

 , где R1, R2 – сопр. ст. и возд.
, где R1, R2 – сопр. ст. и возд. , где S – эффект-ая площ-дь мембраны, характер-ий мембрану как измер-ый преобр-ль. Р – входная величина (давление). F – сила (вых-я величина).
, где S – эффект-ая площ-дь мембраны, характер-ий мембрану как измер-ый преобр-ль. Р – входная величина (давление). F – сила (вых-я величина). , ε – относ. деформ-я (вых. величина упр-го элемента), S – пл-дь попер-го сечения упр-го элемнта, Е – модуль Юнга, F – сила (вход. величина)
, ε – относ. деформ-я (вых. величина упр-го элемента), S – пл-дь попер-го сечения упр-го элемнта, Е – модуль Юнга, F – сила (вход. величина)


